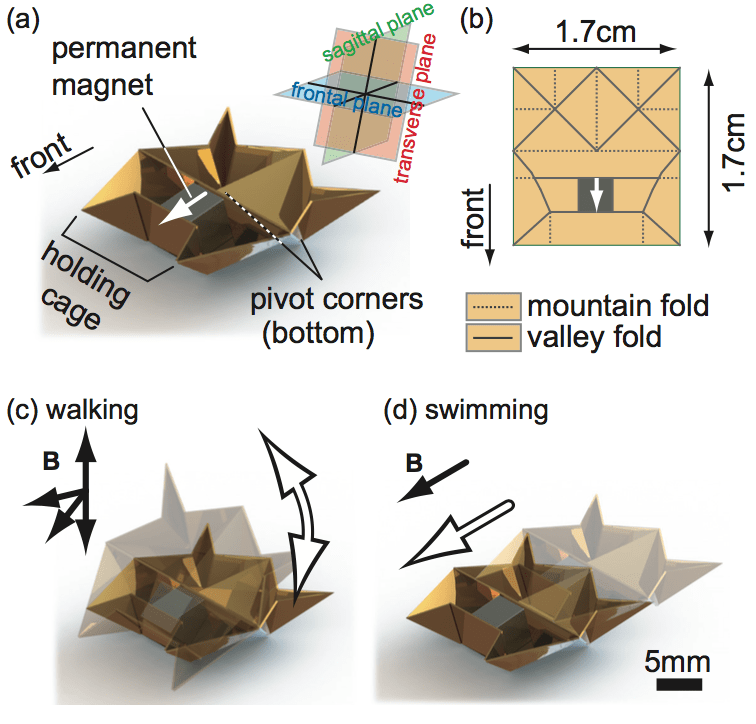
Projekt na chwilę obecną jest gotowy w skali mikro (docelowo w nano). Rozłożony robot to kwadrat o boku długości 17 mm i wadze 0.31 g skonstruowanego z PVC zawartego między dwoma warstwami polistyrenu (lub papieru), zawierającego magnes stały.
PVC kurczy się pod wpływem temperatury, tworząc zagięcia w miejscach ponacinanych laserem. Po upływie minuty robot przyjmuje swoją funkcjonalną formę, będącą w stanie "chodzić" z prędkością 4 cm/s oraz pływać.
Gdy mikrobot przestaje być potrzebny, można go rozpuścić - niemalże w całości (z wyjątkiem magnesu) - w acetonie. Całą tą funkcjonalność można zaobserwować na poniższym filmiku:
Oczywiście, na robocie nie znajdziemy żadnego silnika. Poruszanie się umożliwia specjalnie przygotowana powierzchnia. Umieszczono pod nią cztery cewki o nachyleniu 45 stopni. Oczywiście ogranicza to zasięg działania i użyteczność całego projektu, ale jest to oczywiście tylko jedna z pierwszych, prototypowych wersji robota.
Czy tak właśnie będą wyglądały w przyszłości nanoboty?
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...