Jednym z dylematów, które pojawiają się podczas budowy dwunożnych robotów kroczących jest konstrukcja stóp. Większa ich powierzchnia pomaga utrzymać stabilność, ale niestety pogarsza dynamikę ruchu robota.
Autor tego rozwiązania sięgnął po coś nowego i zamontował w stopach robota turbiny!
Jak można zauważyć zdecydowana większość robotów humanoidalnych narażona jest na upadek. Wynika to z prób uzyskania chodu dynamicznie stabilnego, w którym środek ciężkości robota znajduje się poza wielokątem podparcia. Jedną z metod zapobiegania upadkom jest zwiększenie rozmiaru stóp robota. Niestety zwykle prowadzi to do budowy niezdarnego robota, który z każdym krokiem przesuwa się o pojedyncze centymetry.
Twórca opisywanego robota postanowił odejść od znanych metod i wykorzystał duży ciąg silników modelarskich, które pozwalają utrzymać robota w pozycji stojącej. Dzięki temu konstrukcja ta potrafi wykonywać wręcz gigantyczne kroki!
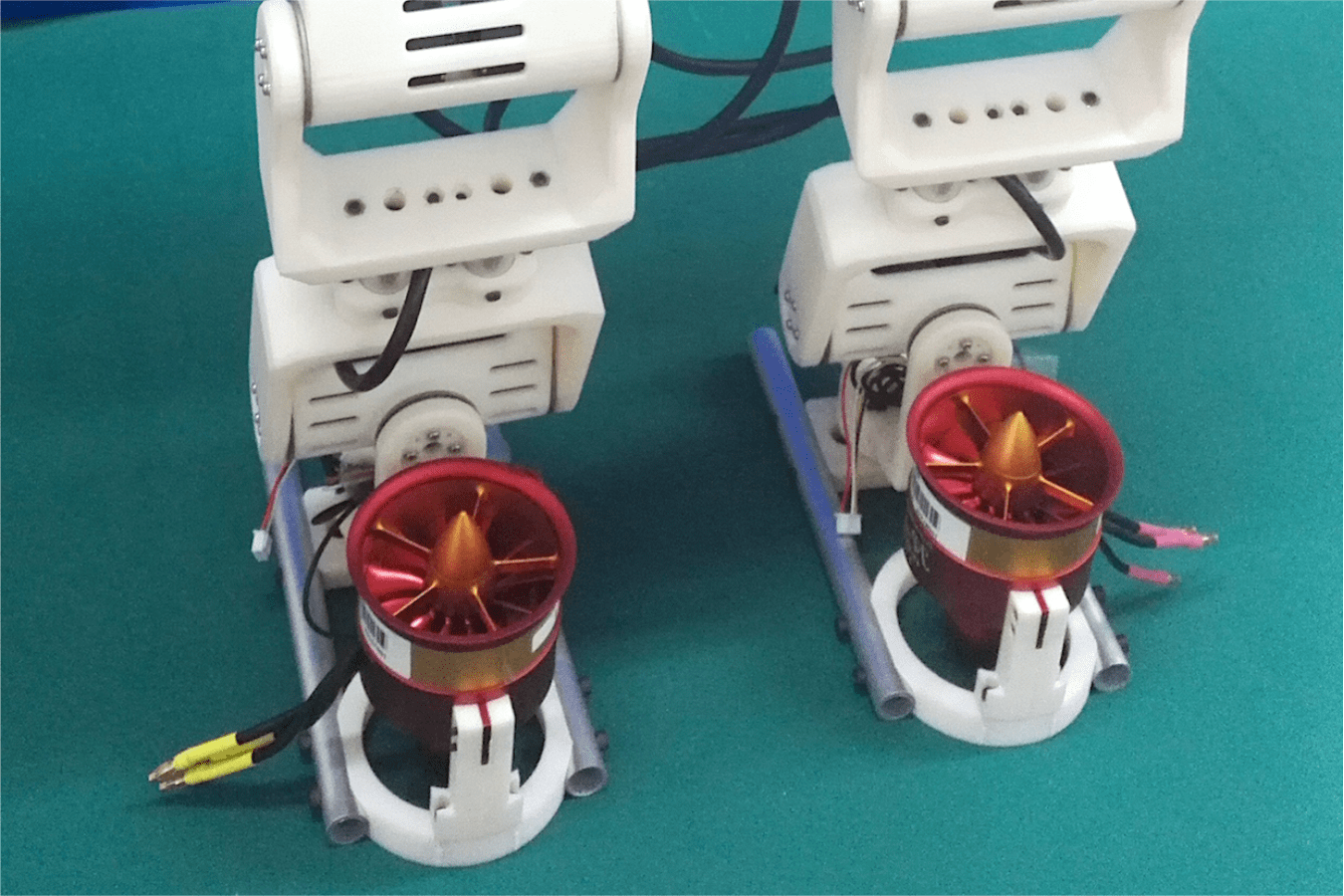
Dwunożny robot Jet-HR1 powstał na Uniwersytecie w chińskiej prowincji Guangdong i zdecydowanie wyróżniają go dwie turbiny umieszczone w stopach. Konstrukcja waży 6,5 kg zaś każda z dwóch turbin zapewnia ciąg utrzymujący aż 2 kg.
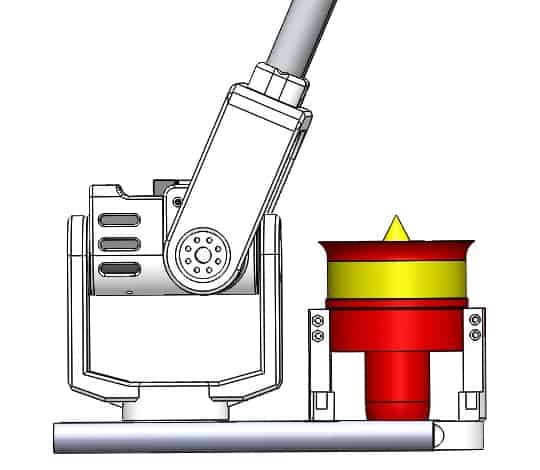
Budowa stopy robota.
Takie rozwiązanie umożliwia coś, co jest niewykonalne w przypadku innych robotów – stawianie kroków dużo większych niż długość stóp robota i pokonywanie przeszkód w postaci szerokich "przepaści". Wyjątkowa cecha tego rozwiązania sprawia, że może ono znaleźć zastosowanie w robotach do inspekcji np. niebezpiecznych obiektów. Roboty wyposażone w taki napęd będą w stanie poradzić sobie z nierównym terenem i przeszkodami.
Sam pomysł jest wciąż rozwijany. Dodatkowe napędy mogą również ułatwić obracanie się robota oraz sprawić, że stawiane przez niego kroki będą bardzo precyzyjne.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...