Kursy • Poradniki • Inspirujące DIY • Forum





Wpisy z tagiem: robot, strona 21
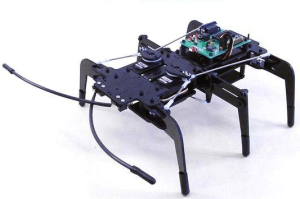
Roboctopus coraz bardziej przypomina ośmiornicę

Widzieliście kiedyś ośmiornicę spacerującą po dnie morza? Zapewne nie, bo takie przechadzki są dla nich dość rzadkie.
Na szczęście dzięki umiejętnościom greckich uczonych, możemy oglądać mechaniczną ośmiornicę, robiącą tego typu sztuczki.
PIBOT – robot, który pilotuje samoloty

Kto z Was leciał kiedyś samolotem? Zgaduję, że spore grono. A kto z Was leciał samolotem, którym nie sterował ani człowiek, ani autopilot tylko... robot?
Pewnie jeszcze nikt. Jednak humanoidy, takie jak PIBOT, powoli siadają za sterami.
Nowi kelnerzy – roboty pracują w restauracji

Roboty przyciągają do siebie publiczność (zwłaszcza dzieci), to nie ulega wątpliwości. Dlatego Asimo Hondy zazwyczaj robi furorę na konferencjach, spotkaniach itp.
Jednak, aby go wynająć, potrzeba potężnych funduszy, ta sytuacja dała do myślenia pewnemu chińskiemu przedsiębiorcy.
Egzoszkielet od Daewoo; Świecący MorphHex

Roboty mogą być silniejsze od ludzi. Jednak nawet najlepsza z maszyn nie wykona niektórych zadań szybciej od wyszkolonego pracownika.
Obecnie najlepszym wyjściem jest wykorzystanie egzoszkieletu. Na pomysł ten wpadła także firma Daewoo, która tworzy takie wspomaganie dla swoich stoczniowców.
Od obwodu elektrycznego do pierwszego robota

Robotyka staje się coraz popularniejszym hobby. Od kilku lat możemy zaobserwować więcej tematycznych książek.
Tym razem przez kilka dni zaglądałem do nowej pozycji wydawnictwa Helion przeznaczonej dla początkujących robotyków. Książka jest cienka, więc recenzja również nie będzie długa.
Budowa robotów dla średniozaawansowanych – Helion 2013

Samodzielna budowa robotów wymaga wiedzy z wielu dziedzin techniki.
Niedawno wydano drugą część książki, będącej kursem tworzenia robotów. Tym razem, zgodnie z tytułem, lektura przeznaczona jest dla czytelników średniozaawansowanych.
Budowa robotów dla początkujących – Helion 2012

Wydawnictwo Helion dodało do swojej oferty książkę, która zainteresuje początkujących robotyków. Mowa o pozycji Budowa robotów dla początkujących, której autorem jest David Cook, pasjonat elektroniki, konstruktor robotów.
Miałem nadzieje odnaleźć w niej złoty środek na problemy początkujących. Czy się udało? O tym w recenzji.
Roboty kroczące – teoria i podstawy projektowania
Projektując robota kroczącego, konstruktor musi odpowiedzieć sobie na wiele pytań. Wiąże się to między innymi z założeniami konstrukcyjnymi.
Część z nich jest natury ogólnej, część musi jednak być szczegółowa. W artykule opisałem najważniejsze zagadnienia związane z projektowaniem robotów mobilnych kroczących.
Jak zrobić przekładnię do robota?
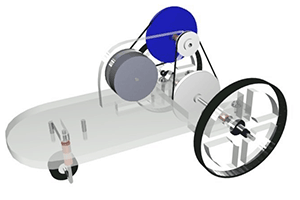
Hobbyści budując roboty często napotykają problem: skąd wziąć silnik z przekładnią? W mniejszych konstrukcjach przeważnie używane są serwomechanizmy modelarskie.
Osobiście do tego celu wykorzystuję części mechaniczne ze zużytych sprzętów elektronicznych (magnetofonów, magnetowidów, napędów CD-ROM do PC itp).






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




