We wszystkich niemal konstrukcjach robotów mamy do czynienia z przekładniami. Wyjątkami są tu roboty budowane na silnikach krokowych oraz lekkie konstrukcje, których silniki mają wystarczająco duży moment.
Dobry konstruktor powinien jednak w swoich robotach stosować odpowiednie przekładnie.
Niniejszy artykuł ma na celu zapoznanie czytelnika z podstawowymi obliczeniami potrzebnymi przy budowie lub wykorzystywaniu przekładni. Dodatkowo zostaną zwięźle przedstawione podstawowe rodzaje przekładni. Artykuł dotyczy przekładni mechanicznych. Nie zostały tu zamieszczone informacje na temat np. przekładni hydraulicznych, gdyż w warunkach amatorski spotykane są niezwykle rzadko.
Podstawowe pojęcia
Najpierw wyjaśnijmy sobie prostym językiem (nie def. fizycznymi) dwa pojęcia:
Prędkość obrotowa - prędkość, z jaką ciało obraca się wokół danej osi. Przykładem może być wał silnika, który po włączeniu silnika obraca się wokół osi, którą stanowi jego środek.
Najczęściej prędkość obrotową podaje się w jednostkach [rpm] co oznacza obroty na minutę.
Mając silnik, którego wał wiruje z prędkością obrotową 500 [rpm], wiemy, że obróci się on w ciągu jednej minuty 500 razy. Inną jednostką jest [rps]. Jeśli ciało wiruje z prędkością obrotową 50 [rps], to znaczy, że w ciągu jednej sekundy wykona 50 pełnych obrotów. Im szybciej nasz wał się obraca, a co za tym idzie - szybciej obracają się napędzane koła, tym szybciej jedzie nasz robot.
Moment obrotowy - miało być bez skomplikowanych definicji fizycznych. Prostymi słowami można powiedzieć, że im większy moment w robotyce, tym lepiej. Im większy moment obrotowy, tym więcej może "uciągnąć" silnik. Mając moment 1 [kg/cm], wiemy, że gdybyśmy w odległości 1 cm od środka wału zaczepili 1 kg to silnik jeszcze ruszy, ale gdy zaczepimy 1,1 kg to już nie. Inną jednostką, w której podaje się moment obrotowy jest [N*m]. Zamiana między jednostkami jest bardzo prosta wystarczy skorzystać ze wzoru:
Gdzie za X należy podstawić moment w [kg/cm], a w wyniku otrzymamy odpowiednik w [N*m]. Można więc zamienić moment 1 [kg/cm] korzystając ze wzoru w następujący sposób:
W drugą stronę też nie ma problemu z zamianą, oto wzór:
Gdzie za Y należy podstawić moment w [N*m], a w wyniku otrzymamy odpowiednik w [kg/cm]. Można więc zamienić moment 0.0981 [N*m] korzystając ze wzoru w następujący sposób:
Prawda, że proste?!
Znając teraz te dwie wielkości, możemy przejść nieco dalej. Biorąc dowolny goły silnik prądu stałego i jego dokumentację, szybko stwierdzimy, że charakteryzuje się on dużą prędkością na wyjściu, ale małym momentem.
Niestety, nie są to parametry zadowalające przy budowie robotów. Konstrukcja, która z szybkim silnikiem teoretycznie pojedzie 50km/h, okaże się niepraktyczna. Silniki będą miały zbyt mały moment obrotowy, aby ją poruszyć - nawet same koła mogą okazać się zbyt ciężkie. Może trochę przesadzam, ale i tak ciężko będzie się obejść bez przekładni.
Co daje przekładnia mechaniczna?
Używając przekładni możemy zyskać większy moment kosztem zmniejszenia prędkości obrotowej lub większą prędkość obrotową kosztem mniejszego momentu.
Drugi przypadek interesuje nas (robotyków) bardzo rzadko. W robotyce raczej używa się przekładni zwiększających moment, a zmniejszających prędkość (no cóż, nic za darmo).
Wszystko możemy przeliczać, używając poniższego wzoru:
Moment na we * Prędkość obr. na we = Moment na wy * Prędkość obr. na wy
Gdzie we oznacza wejście przekładni, zazwyczaj wał silnika, a wy wyjście przekładni, zazwyczaj wał, na którym zaczepiamy koła. Z dokumentacji silnika odczytujemy jego moment i prędkość obrotową, a następnie korzystamy ze wzoru w sposób przedstawiony w przykładzie.
Przykład
Zakładamy, że mamy silnik o momencie 0.0981 [Nm] oraz prędkośćci1000 [rpm]. Na wyjściu chcemy uzyskać moment 2 [Nm] przy prędkości wyjściowej nie mniejszej od 400 [rpm].
0.0981 * 1000 = 2 * Prędkość wy Prędkość wy = 49,05 [rpm]
Wynik: Silnik nie nadaje się do naszego zastosowania. Uzyskane 49,5 [rpm] jest zdecydowanie mniejsze od oczekiwanych 400 [rpm].
Jak widać używając tego wzoru można np. sprawdzić, czy silnik spełnia nasze wymagania.
Dobieranie przekładni mechanicznej
Uzbrojeni w podstawową wiedzę rozpatrzmy praktyczne przykłady. Podany wyżej wzór pomoże nam sprawdzić, czy wybrany silnik jest odpowiedni do naszych zastosowań, czy nie. Jednak nie powie, jak dobrać przekładnię, by otrzymać zakładane wartości na wyjściu. Parametrem, który nam w tym pomoże jest współczynnik przełożenia.
Przyjęte oznaczenia
W dalszej części artykułu przyjęto oznaczenia jak poniżej:
Mwe – Moment obrotowy na wejściu przekładni
Mwy – Moment obrotowy na wyjściu przekładni
Vwe – Prędkość na wejściu przekładni
Vwy – Prędkość na wyjściu przekładni
N – współczynnik przełożenia
S – Sprawność w procentach
Wyraz koło oznacza koło zębate, pasowe itp. z których zbudowana jest przekładnia.
Rodzaje przekładni mechanicznych
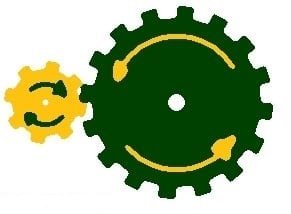
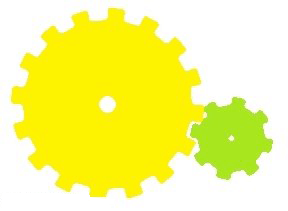
Podstawowa i bardzo często wykorzystywana przekładnia składa się z dwóch kół. Mogą to być koła zębate, koła pasowe itp. Zasada jest taka sama, jeżeli chcemy uzyskać większy moment na wyjściu i zredukować przy tym obroty. Używamy do tego koła mniejszego i większego. Mniejsze koło stanowi wejście przekładni (nakłada się je na wał silnika), natomiast większe to wyjście przekładni (nakłada się je na wał koła robota).
Jak pokazuje poniższa animacja, koło mniejsze kręci się szybciej od koła większego:
Prosta przekładnia Źródło: wikipedia.pl
Jednak, co ważne, koło większe kręci się z większym momentem. W ciągu jednego pełnego obrotu dużego koła, małe obróci się 3 razy (dokładnie 2,8 ale zakładamy, że 3, żeby było ładniej). Dlatego też prędkość na wyjściu jest 3 razy mniejsza, a moment 3 razy większy.
Powyższa przekładnia ma współczynnik przełożenia:
Znając N oraz poniższe wzory:
można obliczyć moment i prędkość na wyjściu. Zakładamy że nasz silnik ma:
Mwe = 1 [kg / cm]
Vwy = 600 [rpm]
Używając przekładni o N = 3, na wyjściu otrzymujemy:
Wiemy już jak przeprowadzać proste obliczenia. Rozwiążmy teraz następujący problem. Mamy silnik o Mwe = 1 [kg/cm] i Vwe = 500 [rpm]. Nie interesuje nas prędkość obrotowa wyjściowa, chcemy tylko, aby moment na wyjściu wynosił minimum 5 [kg/cm]. Policzmy wymagany współczynnik przełożenia przekładni:
Po przekształceniu i podstawieniu wartości:
Tworzenie odpowiedniej przekładni mechanicznej
Z powyższych wyliczeń wynika, że potrzebujemy przekładni o N = 5. Wszystko pięknie, ładnie, ale musimy taką przekładnię zrobić w domu ze starych rupieci lub wyciąć koła pasowe z drewna lub desperacko odlać z cyny. Jak dobrać 2 koła tak, by ich współczynnik przełożenia wynosił N = 5?
Zasada jest bardzo prosta. W przypadku przekładni pasowej stosunek średnic obu kół powinien być równy N, czyli w naszym przypadku ma wynosić 5. Biorąc więc dwa koła pasowe o średnicach 0.5 [cm] i 2.5 [cm] osiągniemy zamierzony rezultat (2.5 / 0.5 = 5).
Najlepiej, jeśli koło pasowe mocowane na wejściu przekładni (wał silnika), będzie miało niewielką średnicę. Z tego powodu często wyciąga się takie gotowe kółka np. z napędów CD-ROM. Następnie, w zależności od jego średnicy, dobiera się drugie, większe.
Ważne jest, że przy liczeniu współczynnika przełożenia dzielimy średnicę koła większego (wyjściowego) przez średnicę koła mniejszego (wejściowego).
Przekładnię pasową mamy załatwioną, a co z zębatą? Jak obliczyć współczynnik przełożenia? Najpierw liczymy ilość ząbków na kole większym i dzielimy ją przez ilość ząbków na kole mniejszym. Tak otrzymany wynik to nasz współczynnik przełożenia.
Skorzystajmy z kół z wcześniejszej animacji. Większe ma 28 ząbków (o ile dobrze policzyłem), a mniejsze 10 ząbków.
Mam nadzieję że wszystko jest jasne i zrozumiałe.
Sprawność przekładni mechanicznej
Do pełni szczęścia potrzeba nam jeszcze jednej rzeczy. W obliczeniach nie uwzględniliśmy sprawności przekładni.
Żadna z przekładni nie odda w pełni tak dużej energii jaką otrzyma.
Spowodowane jest to przez m.in. tarcie między ząbkami, poślizg pasa przy przekładni pasowej itp. Nie jest teraz dla nas ważne, gdzie ta energia jest tracona. Ważne, jaka jej część jest tracona. O tym informuje nas sprawność przekładni. Mając w dokumentacji przekładni napisane, że przekładnia ma sprawność 90% można dowiedzieć się, jaką tak naprawdę wartość będą miały Mwy i Vwy. Wystarczy użyć zmodyfikowanych wzorów:
Przykład
Zakładamy że nasz silnik ma następujące parametry: Mwe = 1 [kg/cm], Vwy = 600 [rpm]. Używając przekładni o N = 6 i sprawności S = 90 [%] otrzymujemy:
Z tego jasno wynika, że im większa sprawność tym lepiej.
Rozbudowane przekładnie mechaniczne
Do tej pory analizowaliśmy przekładnie stworzone z 2 kół. Jak jednak poradzić sobie z przekładniami mającymi 3 lub więcej kół zębatych/pasowych?
Zakładamy, że mamy przekładnię stworzoną z 5 kół, jak policzyć N? Sprawa jest prostsza, niż mogłoby się wydawać. Mierzymy średnice ostatniego koła wyjściowego (liczymy ząbki) oraz pierwszego koła wejściowego. Stosunek ilości ząbków (lub średnic - w przypadku przekładni pasowej) obu kół, to nasze N. Koła pomiędzy nas nie interesują!
Mamy przekładnię zbudowaną z 5 kół. Pierwsze, wejściowe, ma 4 ząbki, a wyjściowe 6. Z tego wynika, że N = 6 / 4 = 3 / 2. Jednak należy pamiętać, że przy zastosowaniu więcej niż 2 kół zmniejszy nam się dodatkowo sprawność przekładni.
Aby obliczyć sprawność przekładni wielokołowej musimy znać sprawność danego typu kół. Znajdziemy ją w dokumentacji. Zakładamy, że sprawność naszych kół wynosi 90%. Jest ich 5, więc korzystając z poniższego wzoru obliczymy sprawność wypadkową:
Tak obliczoną wartość S podstawiamy do wcześniej zmodyfikowanych wzorów na Mwy i Vwy.
Przekładnia mechaniczna - kierunek obrotów
Ostatnią ważną rzeczą, którą trzeba zapamiętać, jest kierunek obrotów. Może ktoś już zauważył, że dwa koła zębate kręcą się w przeciwne strony. Dlatego, stosując przekładnię zębatą zbudowaną z dwóch kół, zmieniamy kierunek obrotu wyjścia względem wejścia.
Jeżeli zastosujemy taką przekładnie w naszym robocie to włączając silnik do przodu pojedziemy do tyłu. Należy o tym pamiętać!
Zmiana kierunku.
Jeżeli natomiast przekładnia zębata ma 3 koła to kierunek obrotów wyjścia względem wejścia pozostaje niezmieniony. Ponieważ pierwsze koło kręci się przeciwnie do drugiego, które z kolei kręci się przeciwnie do trzeciego. Wniosek z tego, że trzecie musi się kręcić w tę samą stronę, co pierwsze.
Stosując przekładnię stworzoną z trzech kół zębatych i cewki w roli sprzęgła łączącego wejście z kołem wyjściowym lub za pośrednictwem koła środkowego można stworzyć mechaniczno-elektryczny sterownik zmiany kierunku ruchu robota.
Zmiana kierunku - ogólna zasada
Jeśli przekładnia składa się z parzystej liczby kół, to kierunek zostaje zmieniony. Jeśli natomiast przekładnia składa się z nieparzystej liczy kół, to kierunek nie zmienia się. Co więcej, koła o numerach parzystych kręcą się w tym samym kierunku (przeciwnym do kół o numerach nieparzystych). Czyli koła 1, 3, 177 kręcą się w tym samym kierunku, ale przeciwnie do kół o numerach 2, 4, 6, 8 itd.
Powyższa zasada tyczy się przekładni zębatych (walcowych, stożkowych) oraz ciernych. W przypadku przykładni pasowych złożonych z dwóch kół takie coś nie występuje. Pas powoduje, że oba koła kręcą się w tę samą stronę, podobnie jest w przypadku przekładni z pasem zębatym i z łańcuchem.
Przekładnia pasowa.
W przypadku przekładni ślimakowej ciężej mówić, o zmianie kierunku obrotów, bo ślimak i ślimacznica leżą w prostopadłych płaszczyznach. Jednak z moich eksperymentów wynika, że gdyby ślimak przenieść "w wyobraźni" do płaszczyzny ślimacznicy, to kierunek obrotów także się nie zmienia.
Ciekawostką jest to że gdyby nałożyć pas na koła pasowe w ten sposób:
Czyli w ósemkę, to kierunek obrotu kół przekładni pasowej zmienia się.
Przykłady przekładni różnego typu
Przekładnia zębata walcowa (sprawność ok. 90%)
Przekładnie tego typu są najczęściej używane. Mają dużą sprawność dla wszystkich typów kół. Przy dużych obciążeniach mogą jednak ulegać uszkodzeniu (ząbki mogą się połamać).
Przekładnie śrubowate (sprawność ok. 80%)
Podobne do zębatych walcowych, ale oferują płynniejszą i łagodniejszą pracę. Mogą zmieniać kąt między osiami kół i silnika. Na ogół są jednak droższe.
Przekładnie łańcuchowe (sprawność ok. 80%)
Zdjęć nie ma, bo każdy chyba widział rower, a co za tym idzie przekładnię łańcuchową. Kierunek rotacji sąsiednich kół, podobnie jak w przypadku przekładni pasowej nie zmienia się. Łańcuch ma większą powierzchnie styku z kołami zębatymi, więc występuje większe tarcie, co zmniejsza nieco sprawność. Obliczanie N, podobne jak przy przekładni zębatej, tzn. należy policzyć ząbki obu kół i podzielić przez siebie. Przekładnie tego typu wymagają smarowania.
Przekładnie stożkowe (sprawność ok. 70%)
Przekładnia stożkowa. Źródło: wikipedia.pl
Dobre do zamiany kąta między osiami. Oferują małą sprawność. Występują zarówno jako przekładnie stożkowe zębate i stożkowe śrubowate.
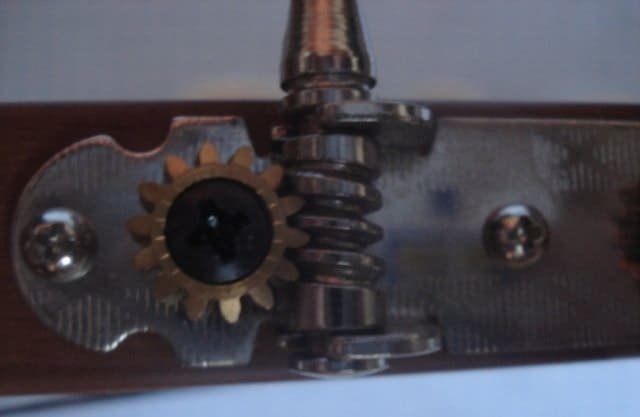
Przekładnia ślimakowa (sprawność ok. 70%)
Przekładnia ślimakowa
Ma bardzo duży współczynnik przełożenia, gdyż w obliczeniach ślimak traktuje się jako koło zębate z jednym ząbkiem. Mając więc przekładnię ślimakową, posiadającą ślimacznicę (takie koło zębate na zdjęciu wyżej) złożoną np. z 50 ząbków to N = 50 / 1 = 50.
Drugą zaletą takiej przekładni jest to, że działa jak hamulec. Otóż od strony silnika bardzo łatwo jest ruszyć kołami robota. Duży współczynnik przełożenia gwarantuje duży moment wyjściowy. Jednak gdy wyłączymy silnik, to robot niemal momentalnie się zatrzyma. Bezwładność kół zostanie zahamowana przez przekładnię. Wynika to min. z budowy ślimaka podobnej do gwinta śruby. Można więc sobie wyobrazić, że podobnie śruba hamuje nakrętkę. Jej też wzdłuż gwintu nie da się przesuwać ruchem postępowym, tylko obrotowym.
Stosuje się ją w dźwigach i gitarach do naciągu strun. Samo zastosowanie w gitarach, gdzie przekładnia musi utrzymać naciągniętą strunę pokazuje jak duże siły jest ona w stanie "hamować". Można więc bez problemu zastosować ją w manipulatorach.
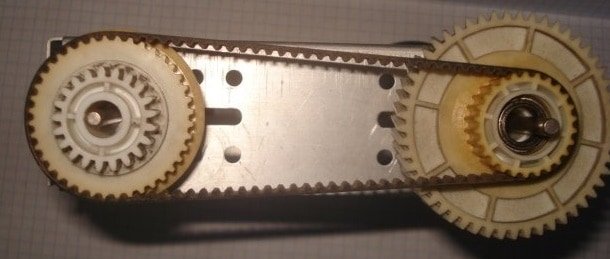
Przekładnia pasowa
Przekładnia pasowa.
Stosuje się je głównie ze względu na prostotę wykonania. Kółka na przekładnię można wyciąć np. otwornicą do drewna. Znaleźć można je bez problemu w CD / DVD, magnetofonach etc. Mają niską sprawność, głównie przez poślizg pasa i tarcie pasa o koła pasowe. Nadają się znakomicie do mniej precyzyjnych zadań. Aby wyeliminować poślizg, stosuje się pasek zębaty, a koła wyposaża się w ząbki. Tak zmodyfikowana przekładnia ma dużą sprawność i pracuje cicho.
Przekładnia cierna
Przekładnia cierna.
Dwa elementy są dociskane do siebie np. sprężyną. Powstaje między nimi połączenie cierne, a siła tarcia odpowiada za przeniesienie napędu. Najczęściej przy rozwiązaniach nie wymagających przenoszenia dużej mocy stosuje się koła w postaci elementów gumowych. Wady takiej przekładni, to poślizg oraz ścieranie się kół, które negatywnie wpływa na pracę przekładni. Sąsiednie koła kręcą się w kierunkach przeciwnych, a współczynnik przełożenia liczy się, dzieląc przez siebie średnice obu kół. Jest prosta do wykonania w domu. Koła gumowe można znaleźć w starych zabawkach, drukarkach, kserach itp.
Zamiana ruchu obrotowego na postępowy (sprawność ok. 90%)
Zamiana ruchu obrotowego na liniowy.
Do zamiany ruchu obrotowego na postępowy i na odwrót używa się przekładni jak na zdjęciu powyżej.
Na koniec wspomnę tylko że przekładnie, które stosujemy w robotach (czyli takie, które redukują prędkość obrotową, a zwiększają moment obrotowy) to przekładnie redukcyjne.
Natomiast przekładnie, które redukują moment obrotowy, a zwiększają prędkość obrotową to przekładnie multiplikujące. Występują też przekładnie, w których współczynnik przełożenia jest równy 1. Stosuje się je wtedy gdy zależy nam np. na zmianie kierunku, co już omawialiśmy.
Podsumowanie
Myślę, że na tym na razie zakończę. Wydaje mi się, że robotykowi amatorowi podane na start informacje w pełni wystarczą.
Przy tworzeniu artykułu korzystałem z informacji zawartych na stronie Society of Robots.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.



























Trwa ładowanie komentarzy...