Niedawno wynalazcy z Uniwersytetu Pensylwanii zaprezentowali autonomiczne quadrocoptery, które prawie samodzielnie pokonywały wąskie otwory.
Prawie, bo przed lotem roboty były informowane o położeniu przeszkód. Od teraz, również to ostanie ograniczenie już nie istnieje. Wszystko za sprawą konstruktorów z Uniwersytetu w Zurychu.
Otwory (ramki) są jedynie 1,5 raza większe niż quadrocopter, a odległość pomiędzy nim a krawędziami wynosi tylko 10 cm z każdej strony. Robot zna wielkość otworu, ale nie wie nic o jego położeniu ani kącie nachylenia.
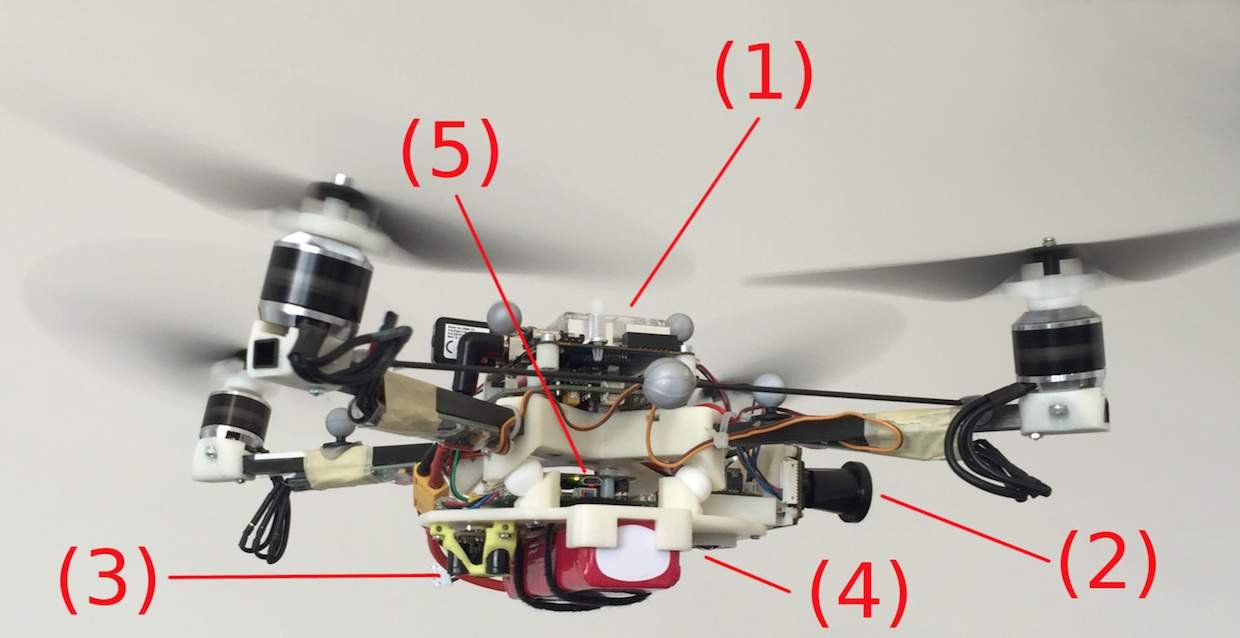
Do samodzielnego wykonania wszystkich potrzebnych obliczeń i skutecznego manewrowania wystarcza sprzęt dostępny nawet dla hobbystów: monochromatyczna kamera o rozdzielczości 752x480px i polu widzenia 180 stopni, autopilot z IMU oraz komputer jednopłytkowy z ROS.
Po pokonaniu otworu, robot korzysta również ze skierowanej w dół kamery
i czujnika odległości w celu stabilizacji.
Quadrocopter lokalizuje otwór i wylicza trajektorię lotu przez jego środek, jak najdalej od krawędzi. Będąc w ruchu robot ciągle obserwuje swój cel i w razie potrzeby wykonuje ponowne obliczenia oraz planuje nową trasę.
Przelot przez otwór odbywa się bez udziału kamery, ponieważ ramka nie znajduje się już w jej polu widzenia. Zadanie kończy się sukcesem w ok. 80% przypadków.
Ostatni krok to stabilizacja. Kąt nachylenia urządzenia i duża prędkość lotu stanowią wyzwanie, ale autonomiczny dron z powodzeniem konkuruje z zawodowymi pilotami quadrocopterów.
Teoretycznie możliwy jest również lot przez kilka otworów bez zatrzymywania się. Im lżejszy quadrocopter, tym mniejsza będzie mogła być odległość między nimi. W planach jest też m.in. manewrowanie w bardziej naturalnych warunkach - omijanie drzew i latarni.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...