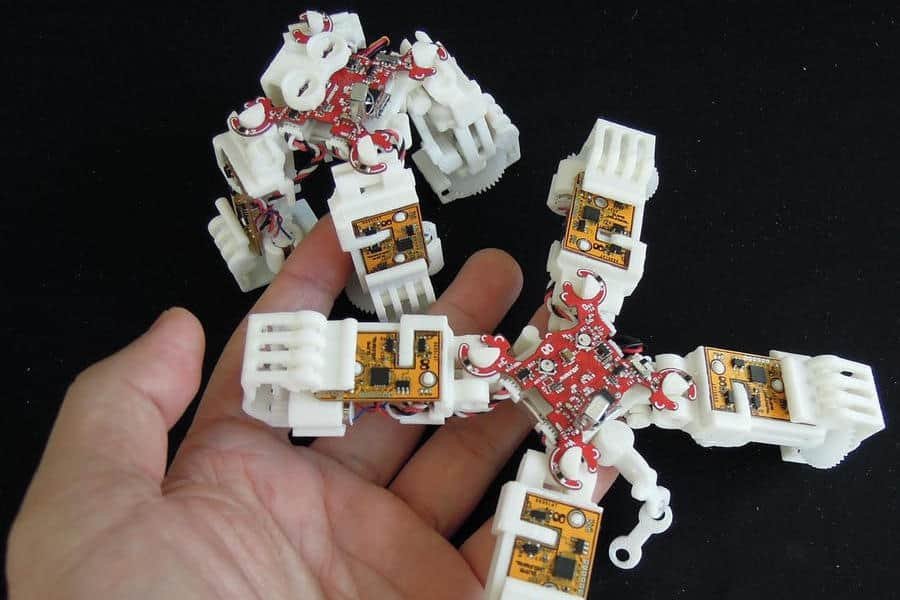
Składanie robotów kroczących z gotowych serwomechanizmów okazało się dla autora tego projektu zbyt nudnym zajęciem. Postanowił pójść o krok dalej i zbudował własne napędy. Ich bazą jest mały silnik DC. Przez koło zębate napędza on nagwintowaną oś o średnicy 2 mm, po której przemieszcza się mała nakrętka. Całość jest łożyskowana wewnątrz miniaturowej obudowy wydrukowanej w 3D.
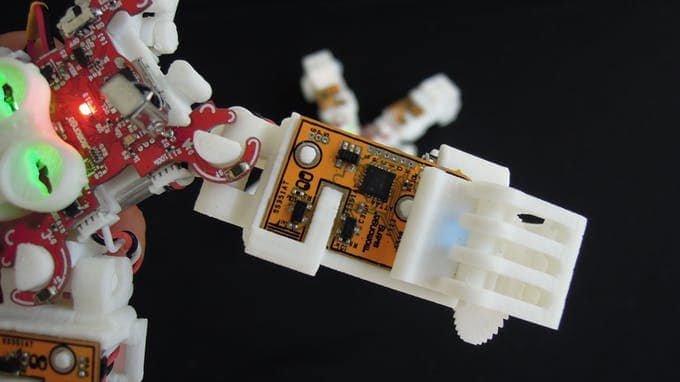
Napęd liniowy DIY (silnik DC w prawym dolnym rogu).
Do tak uzyskanego napędu liniowego zamontowana została dźwignia, która napędza nogi robota. Mechanika to jednak nie wszystko, aby napęd taki mógł działać potrzebna jest elektronika. Obroty osi napędowej są zliczane za pomocą czujnika Halla oraz małego magnesu. Dzięki temu możliwa jest precyzyjna kontrola położenia dźwigni napędowej.
Elektronika sterująca napędem.
Każdy napęd wyposażony jest w mały mikrokontroler ATtiny44/84, sterownik silników oraz czujniki Halla. Tak uzyskane napędy zostały wykorzystane do zbudowania "armii" małych robotów kroczących:
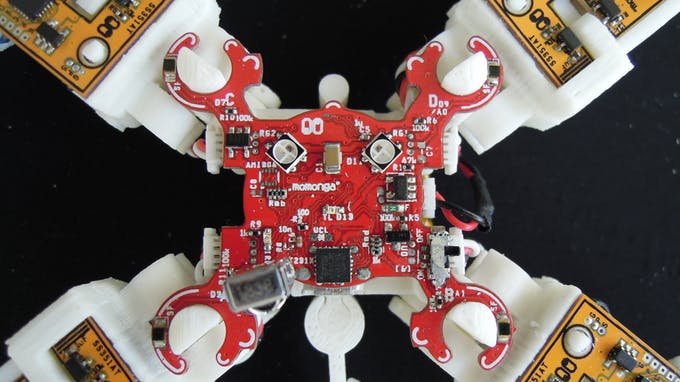
Mózgiem koordynującym pracę 4 nóg jest osobny kontroler, na którego pokładzie znajduje się układ ATmega328P (znany m.in. z Arduino). Na płytce umieszczono dodatkowo 4 czujniki światła oraz odbiornik podczerwieni.
Główny kontroler robota.
Autor oszacował koszt wykonania każdego napędu na 8,21$, a głównego sterownika na 16,86$. Ostatecznie wykonanie robota z takimi napędami jest oczywiście znacznie droższe od wersji, która chodziłaby dzięki serwomechanizmom modelarskim. W tym projekcie chodziło jednak o coś zupełnie innego - większą frajdę z budowy robota, a to się autorowi zdecydowanie udało! Macie jakieś inny pomysł na wykorzystanie takich miniaturowych napędów liniowych?
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




















Trwa ładowanie komentarzy...