Kursy • Poradniki • Inspirujące DIY • Forum





Polecenie nie było zrozumiałe? Ten robot zapyta o szczegóły!

Aby ustrzec robota przed błędami, można np. nauczyć go odczytywać fale mózgowe człowieka. Taka metoda wymaga jednak czepka EEG.
Dlatego wynalazcy z Uniwersytetu Browna wpadli na inny pomysł, który bardziej przypomina kontakt międzyosobowy. Maszyna zadaje pytania, gdy otrzyma niejasne polecenie.
Mistrzostwa Polski Programistów LabVIEW

Trwa rejestracja na 6 edycję Mistrzostw Polski Programistów LabVIEW. Jest to wydarzenie dla studentów oraz zawodowych programistów.
Obowiązkowa rejestracja (również dla gości) kończy się 31.03.2017, zachęcamy do zapisów!
Kurs Raspberry Pi – omawiane zagadnienia

Publikowane na Forbocie kursy podstaw Arduino i elektroniki pomogły wielu początkującym wejść w świat majsterkowania. Jednak cały czas wiele osób pytało kiedy pojawi się kurs Raspberry Pi!
Podjęliśmy więc wyzwanie stworzenia materiałów, dzięki którym każdy początkujący będzie mógł poznać w praktyce ten niesamowicie popularny komputer jednopłytkowy!
RAMBO – granatnik wydrukowany w 3D

Drukiem przestrzenny zainteresowała się Armia USA, która ciągle pracuje nad nowymi metodami produkcji broni.
Właśnie dzięki tej technologii powstał granatnik RAMBO (Rapid Additively Manufactured Ballistics Ordnance). Właśnie zakończono pierwsze testy.
Robotic Tournament – Rybnik, 01.04.2017

Serdecznie zapraszamy wszystkich na dziewiątą edycję Międzynarodowego Turnieju Robotów Robotic Tournament.
Konkurs odbędzie się 01.04.2017 r., w budynku Zespołu Szkół Technicznych w Rybniku przy ulicy Kościuszki 5.
Snapmaker – więcej niż drukarka 3D

Czy można pogodzić niską cenę, prostą budowę oraz precyzję drukarki 3D? Najnowsza kampania na Kickstarterze pokazuje, że tak!
Snapmaker, to nowa, precyzyjna maszyna CNC wyposażona w wymienne głowice do druku 3D, grawerowania oraz frezowania!
Nowy sposób sterowania robotem za pomocą mózgu

Badacze z MIT pokazali nowy sposób sterowania robotem, który nie wymaga wydawania poleceń! System monitoruje fale mózgowe pod kątem potencjałów charakterystycznych dla dostrzeżenia popełnionego błędu.
Wystarczy, że człowiek obserwuje czynności wykonywane przez robota i uznaje je za błędne.
Nvidia Jetson TX2 – jeszcze więcej mocy!

Ogromna moc obliczeniowa, niski pobór energii i mały rozmiar, czy można pogodzić te wszystkie wymagania? Nvidia pokazała, że tak!
Już niedługo w sprzedaży dostępny będzie nowy minikomputer Jetson TX2, zawierający między innymi GPU z 256 rdzeniami CUDA!
Wszystko do robota na jednej płytce – FORBOT Robot Shield
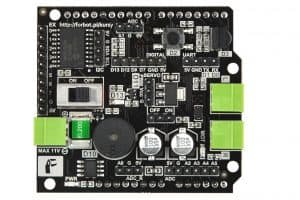
Po starcie naszego kursu budowy robotów wiele osób pytało o moduł, którego używamy podczas budowy robotów. Za pomocą jednej płytki można podłączyć do Arduino m.in. silniki, serwo, czujniki, zdalne sterowanie oraz znacznie więcej!
Płytka trafiła właśnie do sprzedaży. Zachęcam do sprawdzenia pełnej specyfikacji oraz schematu!






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




