Kursy • Poradniki • Inspirujące DIY • Forum





Zdalna identyfikacja dronów w USA?

W 2015 roku w USA weszły w życie przepisy o rejestracji dronów ważących więcej niż 250 g. Otrzymany numer identyfikacyjny należy umieścić na urządzeniu.
Do tej pory nie istnieje jednak wymóg nadawania sygnału pozwalającego na zdalną identyfikację. Ta sytuacja może się wkrótce zmienić.
PUFFER – pomocnik dla łazików zainspirowany origami

Łaziki pracujące na Marsie są zbyt duże, by zwiedzić każdą jego szczelinę, i zbyt drogie, by ryzykować poważny upadek.
Być może w przyszłości pomoże im robot PUFFER, a raczej cały rój tych małych i lekkich urządzeń. Zainspirowane sztuką origami, potrafią one składać się i rozkładać w razie potrzeby.
Dzień darmowej dostawy! Świętuj Arduino Day 2017

Właśnie dziś, 1 kwietnia, na całym Świecie trwa Arduino Day 2017! Jest to prawdziwe święto dla pasjonatów tej niesamowicie popularnej platformy.
Z tej okazji przygotowaliśmy kod rabatowy na darmową dostawę zestawów do naszych kursów Arduino - od podstaw, po budowę robotów!
Interaktywna podłoga do tańca DIY

Widowiskowe efekty świetlne, to nieodłączny element udanej imprezy. Rozbudowane systemy świateł są jednak drogie. Dlatego pewna grupa elektroników wzięła sprawy w swoje ręce!
Tak powstał interaktywny parkiet taneczny, który przekona do zabawy nawet najbardziej upartego podpieracza ścian!
Akumulator przepływowy jednoczenie zasili i schłodzi układ

Badacze z Uniwersytetu ETH i IBM Research stworzyli miniaturowy akumulator przepływowy.
Wynalazek ten będzie można umieścić pomiędzy chipami komputerowymi ułożonymi jeden na drugim. W ten sposób posłuży on jednocześnie do ich zasilania i chłodzenia.
Tarcza sterowana przez Arduino – zostań mistrzem gry!

Pomysłowy elektronik z pewnością jest w stanie uprościć (lub utrudnić) każdą, nawet najprostszą czynność. Idealnym tego przykładem był ostatnio prezentowany sorter cukierków M&M's.
Tym razem przedstawiamy automatyczną tarczę do rzutek! Od teraz traficie w sam środek nawet z zamkniętymi oczami!
Kurs budowy robotów – #10 – podsumowanie, kontynuacja
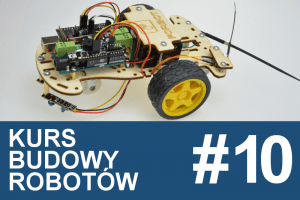
Tworząc poradniki z tej serii, starałem się omówić wszystkie peryferia naszego robota kładąc nacisk na praktyczne przykłady. Jestem pewien, że kurs ten będzie dla wielu osób dobrym początkiem pasjonującej przygody z robotyką!
Wykorzystywana w kursie platforma będzie jeszcze rozwijana. Dodatkowe moduły oraz artykuły pomogą każdemu rozbudować robota!
Up Core – miniaturowa płytka z procesorem Intela

Aeon zapowiedział wydanie Up-Core, odchudzonej wersji Up-Board. Nowy komputer jednopłytkowy będzie mierzył zaledwie 66x56mm!
Na płytce znajduje się wydajny procesor, liczne układy peryferyjne oraz moduły WiFi i Bluetooth czyniące Up-Core doskonałym urządzeniem IoT.
Programowanie Arduino z użyciem MATLAB i Simulink
MATLAB zapewnia wiele potężnych narzędzi idealnych do projektowania robotów mobilnych. Czy można użyć MATLABAa do wygenerowania kodu i zaprogramowania robota?
Dzięki temu darmowemu dodatkowi do Simulinka można programować Arduino stosując intuicyjne bloki i diagramy przepływu stanu!






Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




