RoboBee, czyli latający robot wielkości pszczoły, to niewątpliwie ciekawa propozycja wynalazców z Harvardu. Niestety jest on zbyt mały, aby działał bez zasilającej go uwięzi.
Teraz jego konstruktorzy pokazali coś większego, zbliżonego rozmiarami do ćmy. Na pokładzie tego robota znalazło się miejsce na źródło zasilania, a nawet system komunikacji!
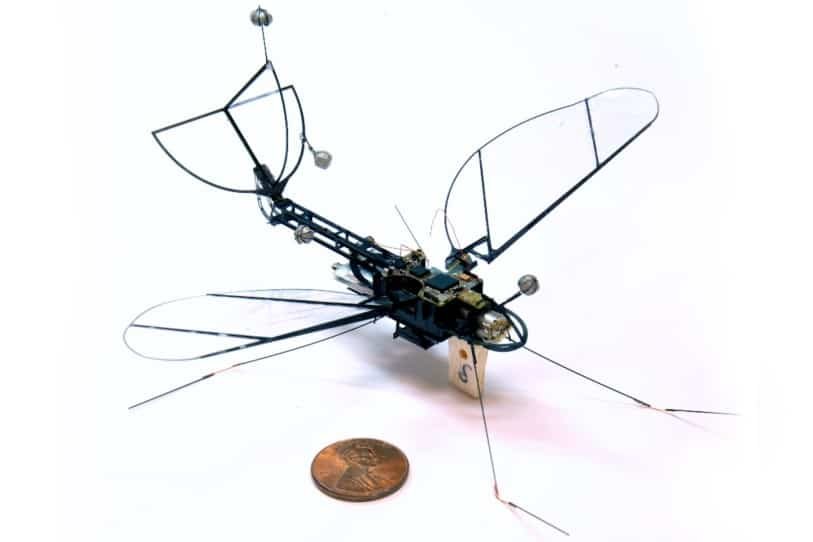
Urządzenie o nazwie FWMAV (Flapping-Wing Micro-Air Vehicle) waży 3,2 g, z czego prawie połowę zajmuje silnik. Rozpiętość skrzydeł wynosi 16 cm. Ważną różnicą pomiędzy RoboBee i FWMAV jest sposób poruszania się. Robo-ćma macha skrzydłami i szybuje tak jak żywe motyle i ćmy.
Ruch obrotowy silnika jest zamieniany na ruch góra-dół. Częstotliwość, z którą FWMAV porusza skrzydłami, to 25 Hz. Ich wychylenie może wynosić nawet 90 stopni, co poprawia aerodynamikę tak samo jak u prawdziwych owadów.
Niestety, jak dotąd, robot nie może poruszać skrzydłami niezależnie. Aby utrzymać równowagę w czasie manewrów wyposażono go ogon, którego budowa ma znacznie więcej wspólnego z samolotem niż z ćmą.
Model FWMAV w 3D.
FWMAV nie potrafi również samodzielnie wystartować – potrzebuje do tego katapulty. Urządzenie może wydawać się prymitywne. Jego twórcy pracują już jednak nad ulepszeniami, m.in. nad niezależnym ruchem każdego ze skrzydeł. Kolejnym krokiem będą również testy na zewnątrz.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...