
Polecane
Ciekawe i popularne projekty zbudowane przez użytkowników FORBOT-a.

OctoMon - czyli gadający monitor do drukarki 3D
ethanak napisał temat w Projekty - DIY,
- 1 odpowiedź

Wybrane przez
Treker,
Konsola PONG
atlantis86 napisał temat w Projekty - DIY,
-
-
- 35 odpowiedzi

Wybrane przez
Treker,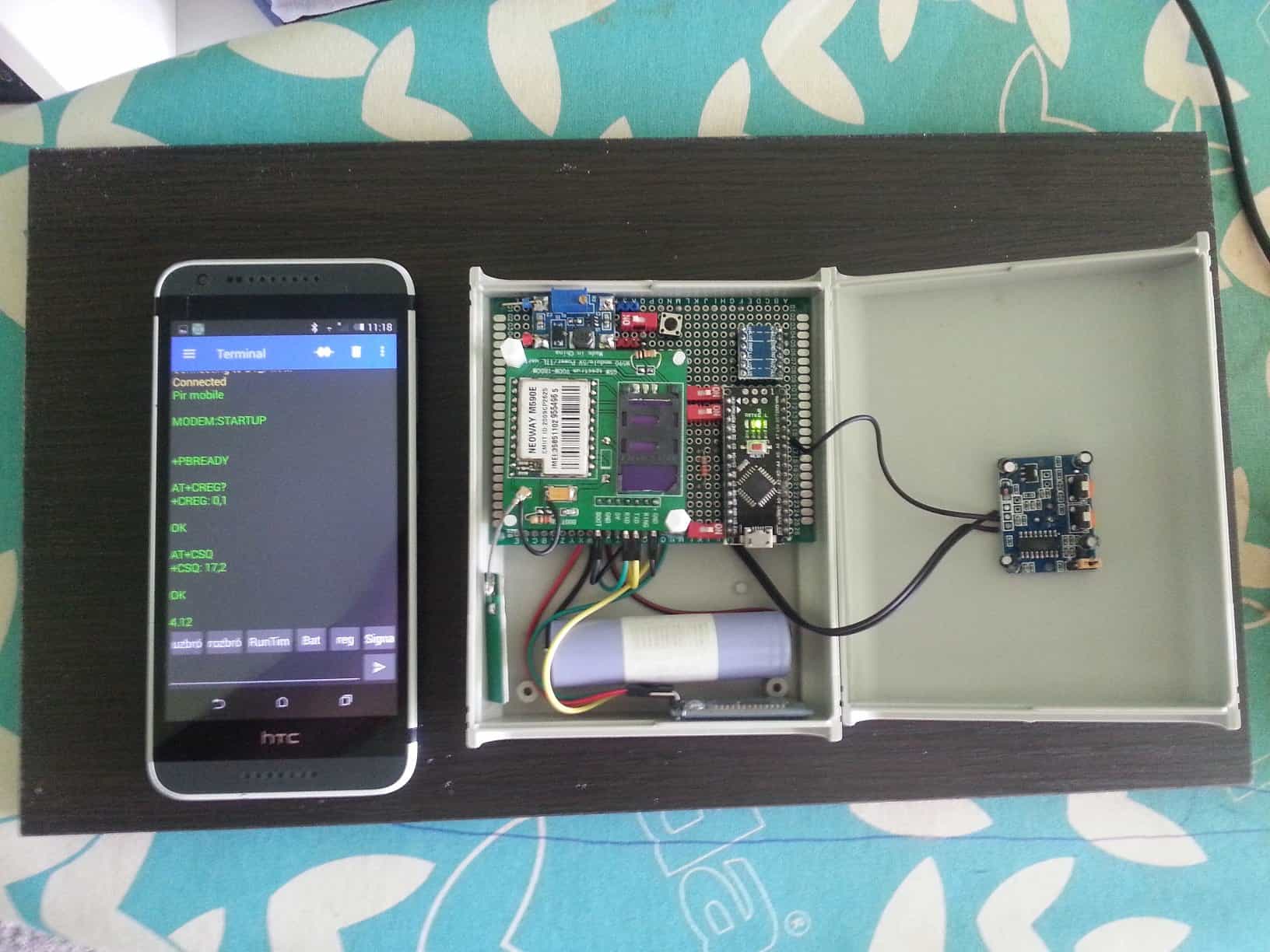
Mobilny system powiadamiania
slon napisał temat w Projekty - DIY,
- 4 odpowiedzi
Wybrane przez
Treker,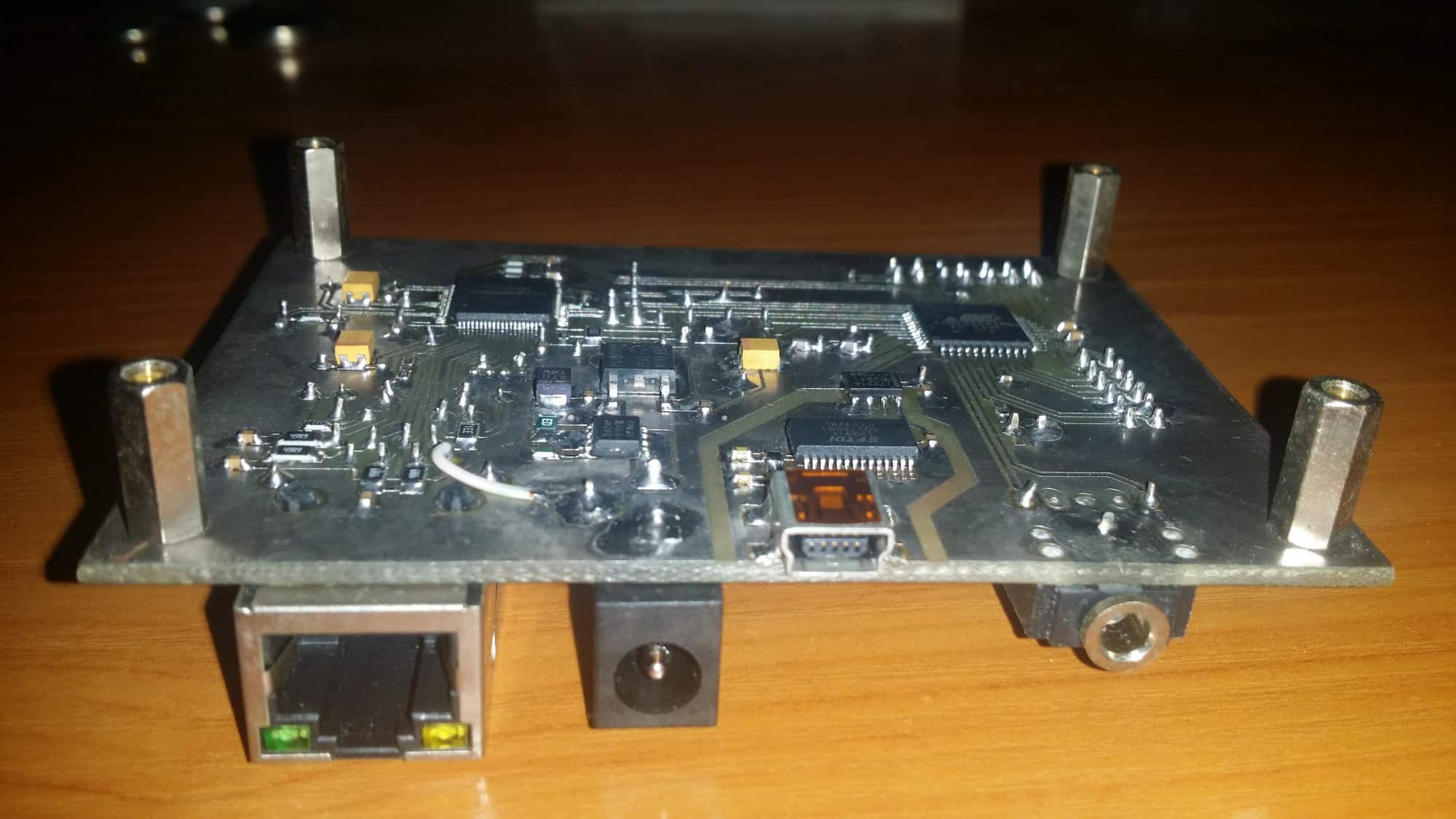
Moduł uruchomieniowy z Atmega644PA i W5100
atlantis86 napisał temat w Projekty - DIY,
- 4 odpowiedzi
Wybrane przez
Treker,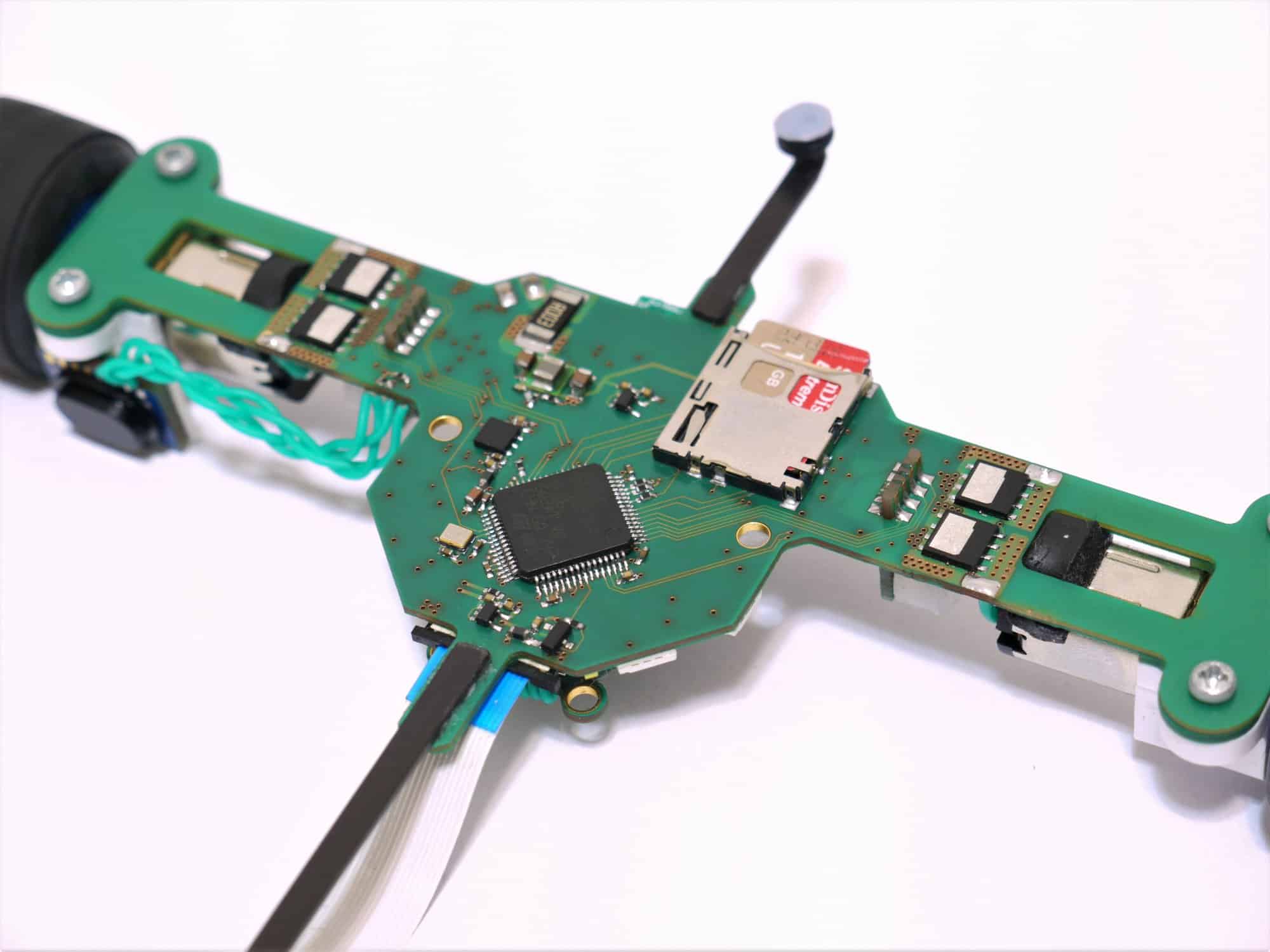
Cukiereczek
mice.co napisał temat w Projekty - DIY roboty,
- 22 odpowiedzi
Wybrane przez
Treker,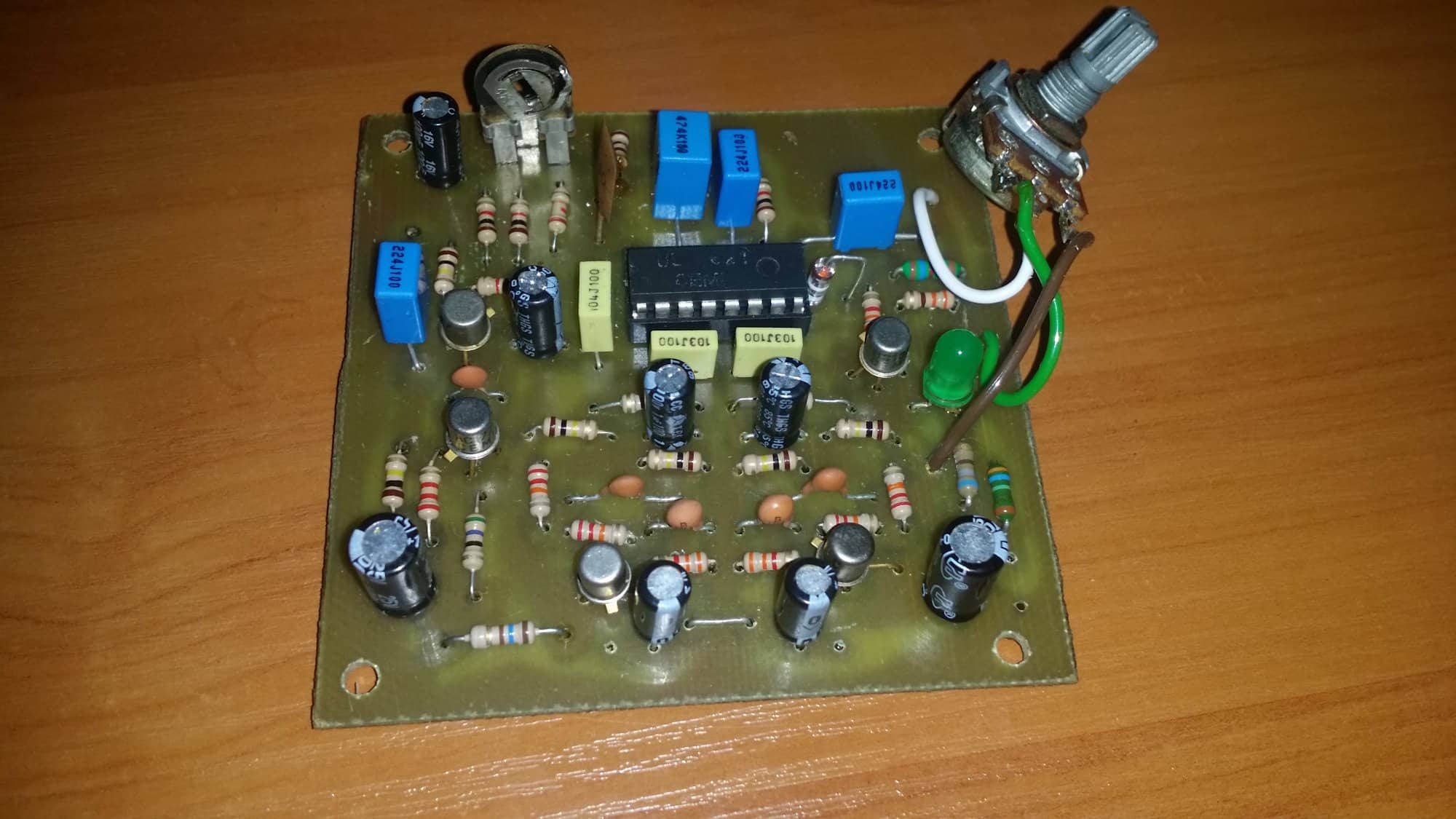
Radio FM w starym stylu
atlantis86 napisał temat w Projekty - DIY,
- 4 odpowiedzi
Wybrane przez
Treker,
Sterownik wędzarni
atlantis86 napisał temat w Projekty - DIY,
- 7 odpowiedzi
Wybrane przez
Treker,
Domowy system powiadamiania
slon napisał temat w Projekty - DIY,
- 12 odpowiedzi
Wybrane przez
Treker,
Lernek - zabawka edukacyjna dla młodszego brata
Dosiek napisał temat w Projekty - DIY,
- 1 odpowiedź
Wybrane przez
Treker,
KTR-X1 8x8 RC (hybryda) big
morelo napisał temat w Projekty - DIY roboty,
-
- 66 odpowiedzi
Wybrane przez
Treker,
Miniaturowy Tetris
jaromaz napisał temat w Projekty - DIY,
- 4 odpowiedzi
Wybrane przez
Treker,
Inklinometr z wykorzystaniem akcelerometru MEMS
lorner napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Treker,
Moduł akcelerometru analogowego
OldSkull napisał temat w Projekty - DIY,
- 7 odpowiedzi
Wybrane przez
Treker,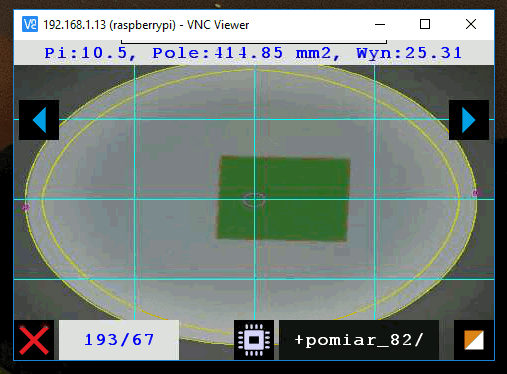
Pomiar pola powierzchni z Raspberry Pi
Gieneq napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Treker,
Autonomiczny robot z układem wizyjnym
Elvis napisał temat w Projekty - DIY,
- 18 odpowiedzi
Wybrane przez
Treker,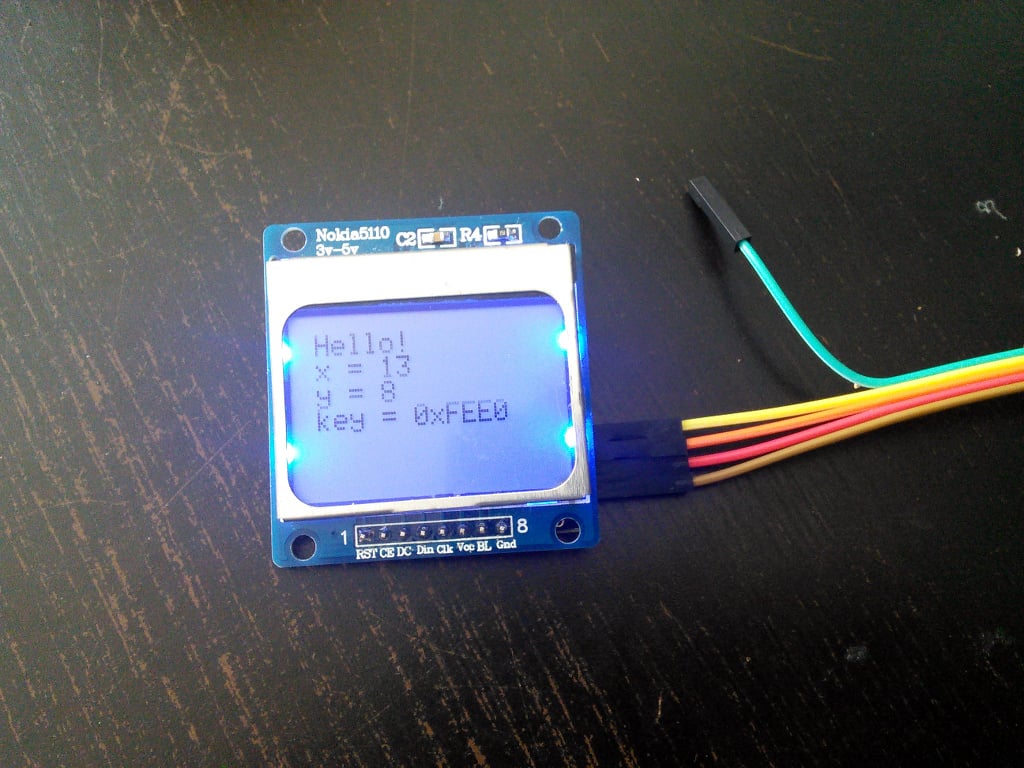
utty - malutki zewnętrzny terminal do debugowania
deshipu napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Treker,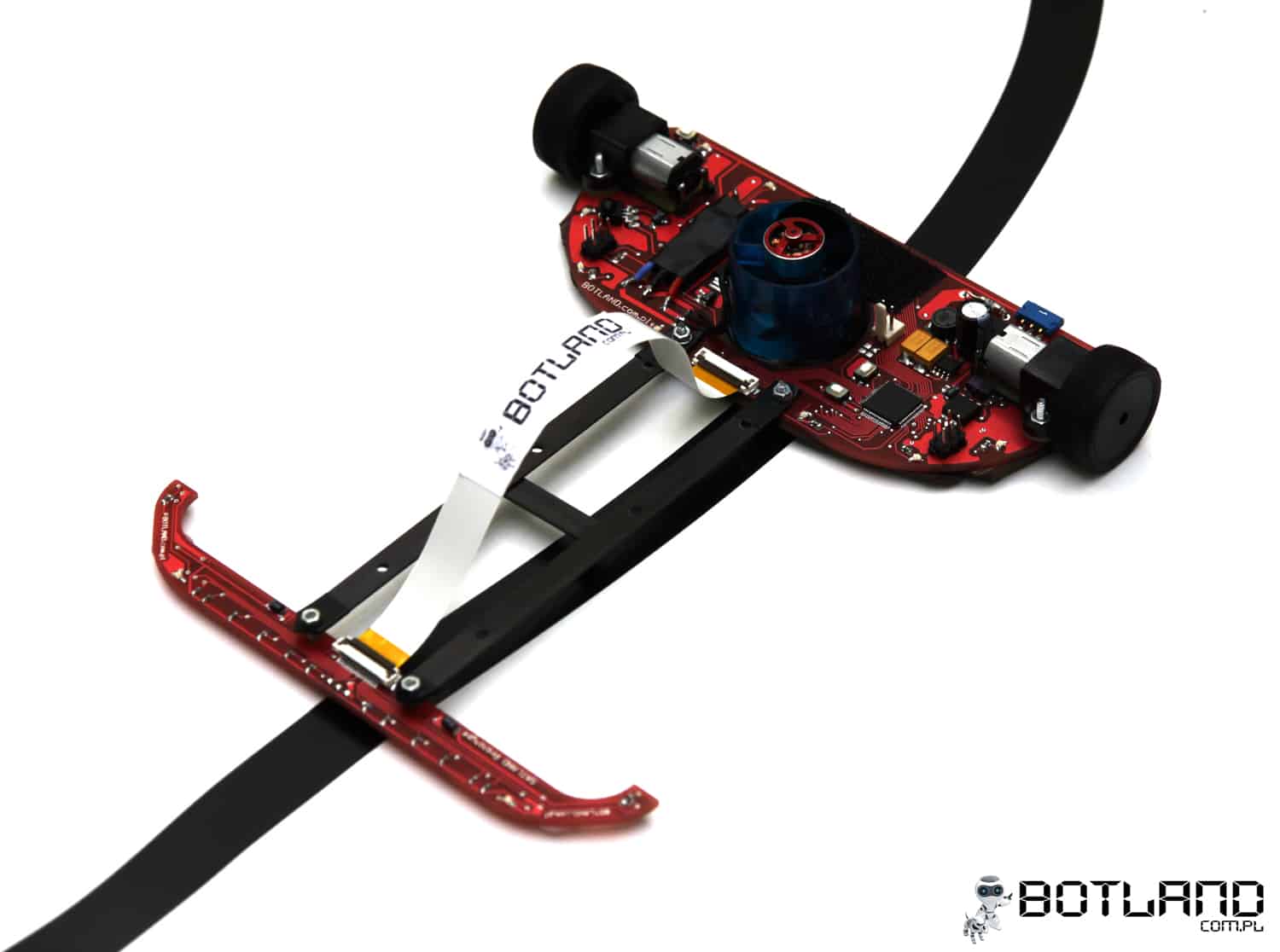
Impact - wersja druga
sailo napisał temat w Projekty - DIY roboty,
-
- 32 odpowiedzi
Wybrane przez
Treker,![[Inny] ILDS Table](https://cdn.forbot.pl/forum/uploads/monthly_2015_05/IMG_5558baef4d3363727.jpg.19fb1b2dcfbf0558a04f68e0a5a89de7.jpg)
[Inny] ILDS Table
Harion napisał temat w Projekty - DIY,
- 3 odpowiedzi
Wybrane przez
Treker,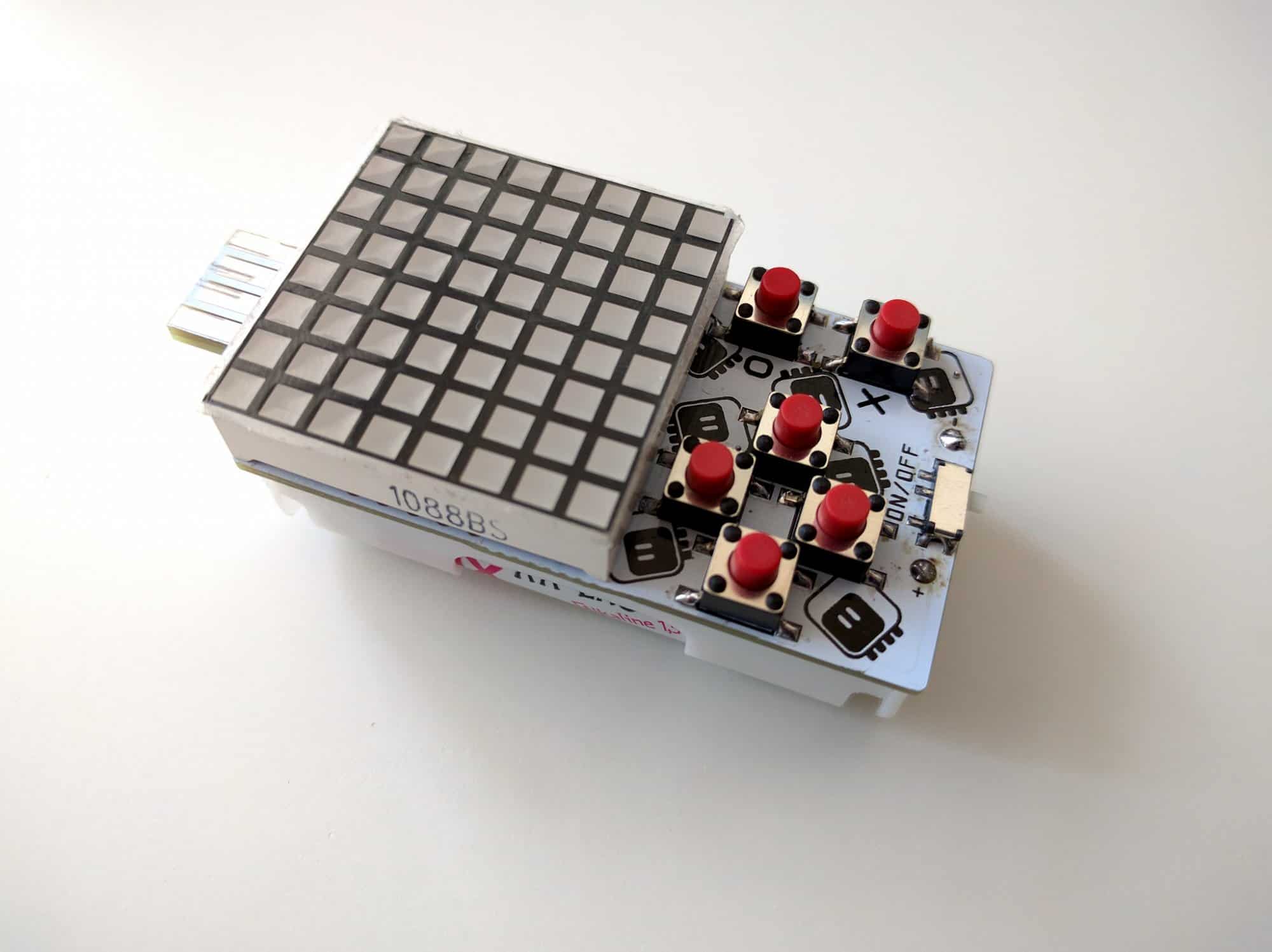
Miniaturowa konsola do nauki programowania gier
deshipu napisał temat w Projekty - DIY,
-
- 55 odpowiedzi
Wybrane przez
Treker,
Inferno
nes86 napisał temat w Projekty - DIY roboty,
-
- 90 odpowiedzi
Wybrane przez
Treker,
Samobieżny manipulator operacyjny
JStan napisał temat w Projekty - DIY roboty,
-
- 31 odpowiedzi
Wybrane przez
Treker,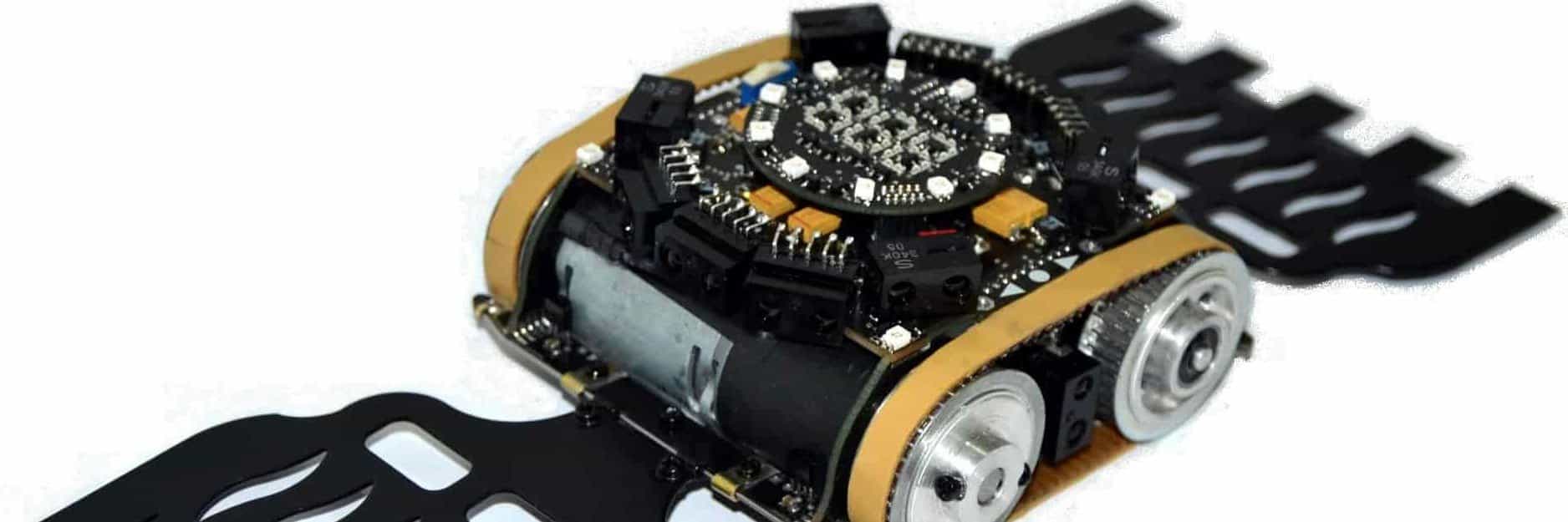
Jeżyk
nes86 napisał temat w Projekty - DIY roboty,
-
- 42 odpowiedzi
Wybrane przez
Treker,
Sonar z przetwornikiem dwukierunkowym
nes86 napisał temat w Projekty - DIY,
- 18 odpowiedzi
Wybrane przez
Treker,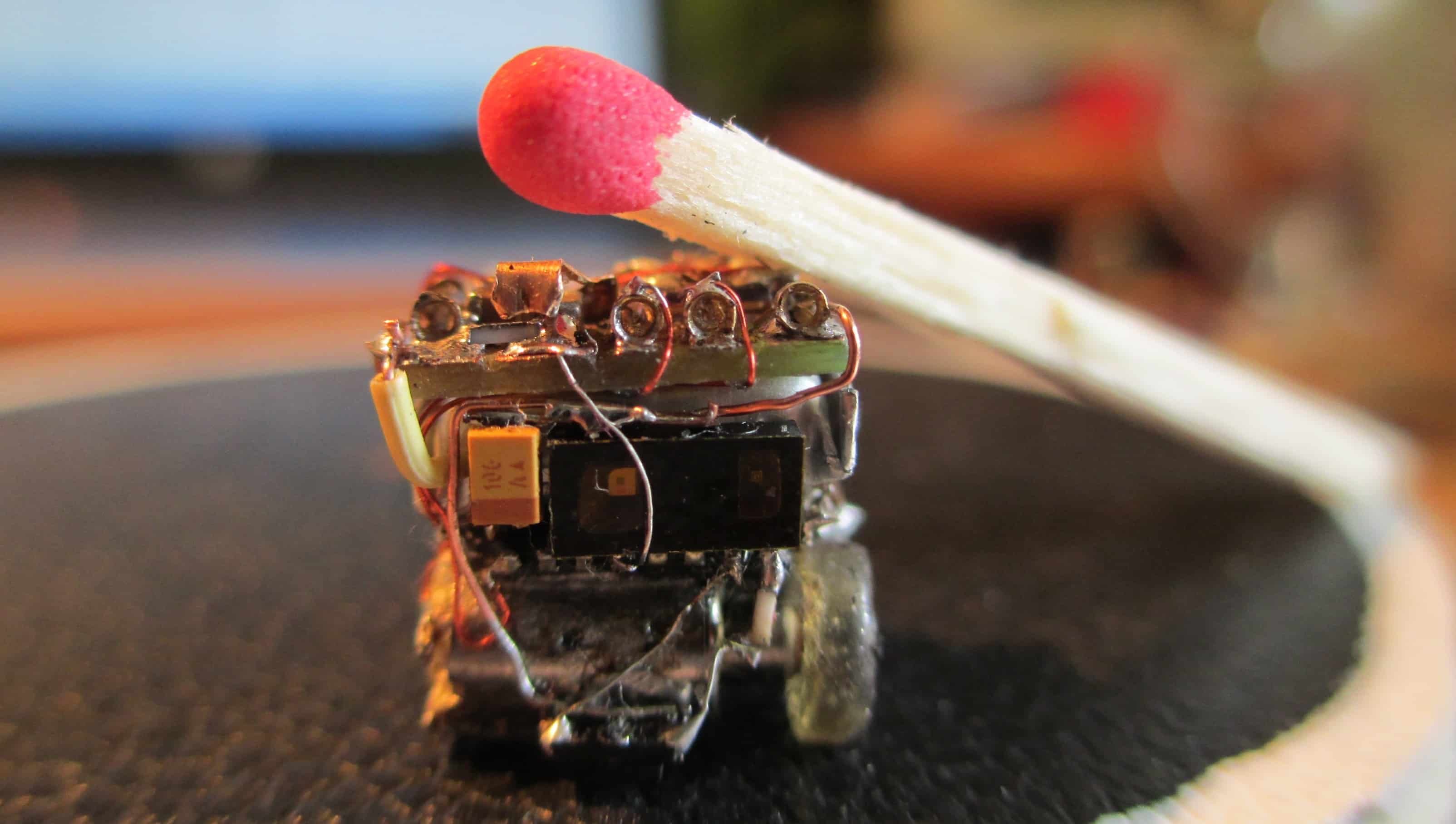
Felek - pierwszy robot klasy Femtosumo
NanoBot napisał temat w Projekty - DIY roboty,
- 24 odpowiedzi
Wybrane przez
Treker,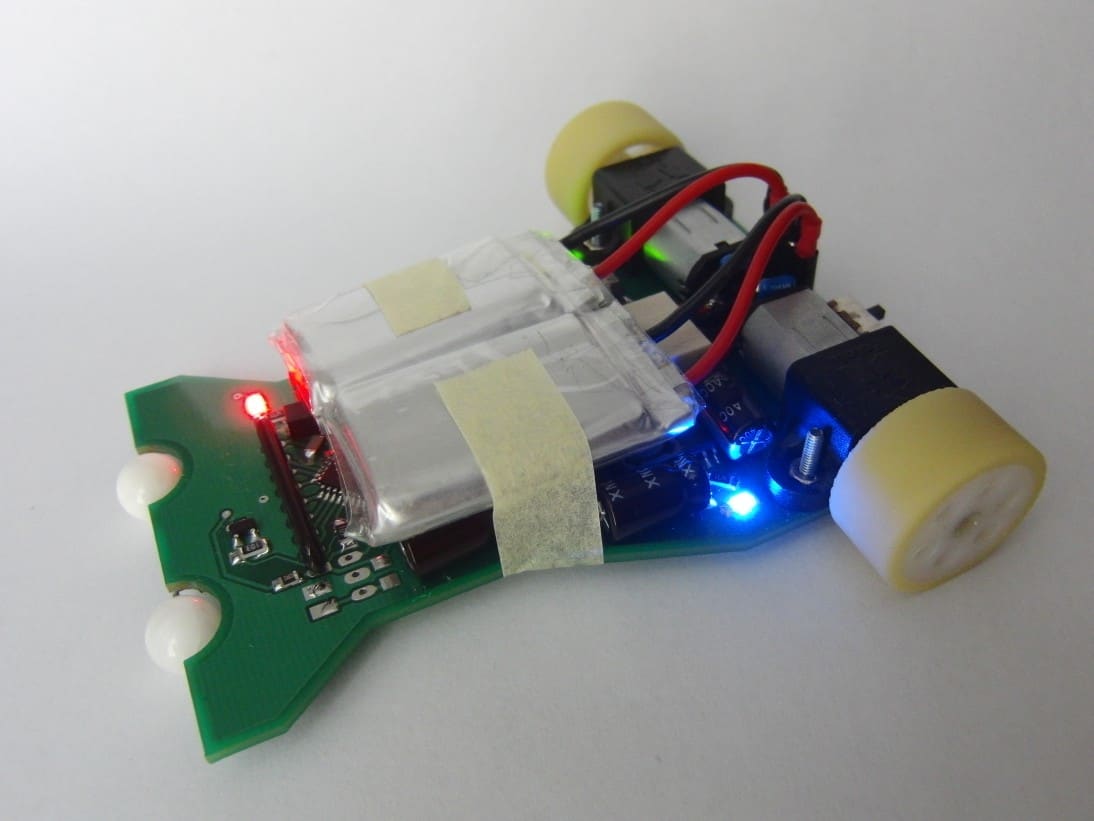
Tsubame
Sabre napisał temat w Projekty - DIY roboty,
-
- 112 odpowiedzi