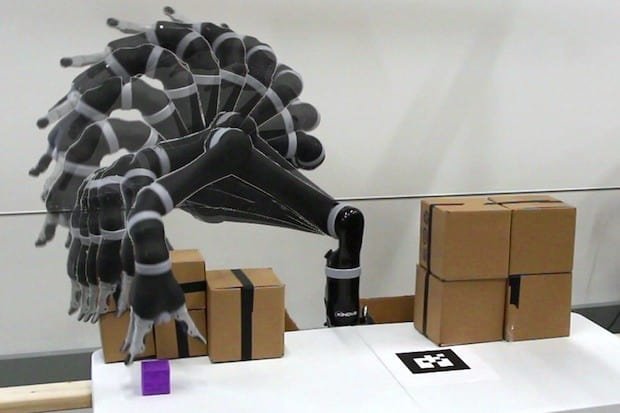
Planowanie trasy, to dla robotów jedna z najważniejszych umiejętności. Myślenie nad tym, w jaki sposób ramię i chwytak mogą ominąć przeszkody, zajmuje czasami ponad sekundę.
Grupa Duke Robotics z Uniwersytetu Duke'a zaprezentowała niestandardowy procesor, który przyspiesza te obliczenia nawet 1000 razy, zużywając 20 razy mniejszą ilość energii.
Do planowania trasy potrzebna jest mapa probabilistyczna (PRM), czyli wykres wszystkich możliwych ruchów, które omijają przeszkody. Pod uwagę trzeba wziąć też ruchy ramienia, a nie tylko samego chwytaka. To właśnie ten aspekt obliczeń sprawia robotom najwięcej kłopotów.
Na początku PRM zawiera siatkę ok. 150 tysięcy wszystkich możliwych ruchów. Wynalazcy zmniejszyli ją do ok. 1000 możliwości. Usunęli te, które były najbardziej nieprawdopodobne oraz przeprowadzili 10 tysięcy symulacji tras z różnymi przeszkodami i wybrali te ruchy, który powtarzały się najczęściej.
Po takim przygotowaniu, do gry wchodzi FPGA (Field Programmable Gate Array). Wynalazcy zaprogramowali go tak, że każdy obwód zajmuje się jednym możliwym ruchem i porównuje go pod kątem kolizji z konkretnym pikselem w obrazie 3D.
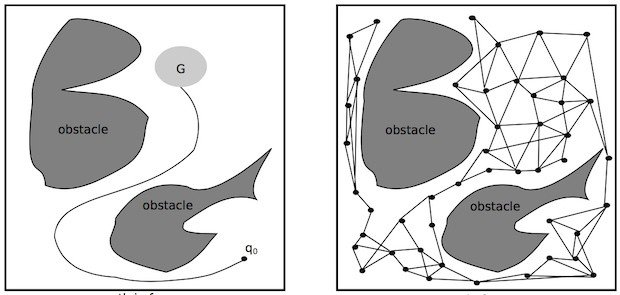
Jeśli nastąpiłoby zderzenie, ruch jest usuwany z PRM. Po zanalizowaniu w ten sposób wszystkich pikseli wystarczy tylko wybrać najkrótszą trasę.
Najkrótsza trasa, która omija przeszkody; PRM - mapa probabilistyczna.
Największą zaletą FPGA jest to, że wszystkie obwody pracują jednocześnie, równolegle. Każdy dodany piksel to tylko 50 dodatkowych nanosekund. Czas przeznaczony na “myślenie” przed wykonaniem ruchu jest niezauważalny – może wynosić nawet 1 milisekundę.
Niestety istnieją też ograniczenia. Po przygotowaniu PRM robot nie może bez ponownych obliczeń przenosić przedmiotów znacznie większych od chwytaka. Dodatkowo PRM dla FPGA może pomieścić tylko kilka tysięcy możliwych ruchów.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.






















Trwa ładowanie komentarzy...