Maya Cakmak, we współpracy z innymi wynalazcami z Uniwersytetu Waszyngtońskiego w Seattle, wyposażyła robota PR2 w podłużny drewniany prostopadłościan. Zawiera on uchwyt oraz część pokrytą silikonem o wysokim współczynniku tarcia.
Gumowa końcówka narzędzia pozwala nie tylko na pchanie przedmiotów, ale także na ich ciągnięcie. Daje to znacznie więcej możliwości niż w przypadku wykorzystywania chwytaków do przesuwania obiektów. W sumie da się wykonać 10 różnych ruchów.
Kijek znajduje się na ramieniu PR2, w łatwo dostępnym miejscu, żeby w razie potrzeby robot mógł w każdej chwili po niego sięgnąć. Urządzenie samodzielnie przewiduje, czy próba chwycenia przedmiotu bez pomocy narzędzia ma szansę zakończyć się sukcesem.
Robot uczy się metodą prób i błędów tego, jak zachowają się obiekty po przesunięciu ich w konkretny sposób. Wymaga to analizy właściwości fizycznych przedmiotu i podłoża oraz użytej siły.
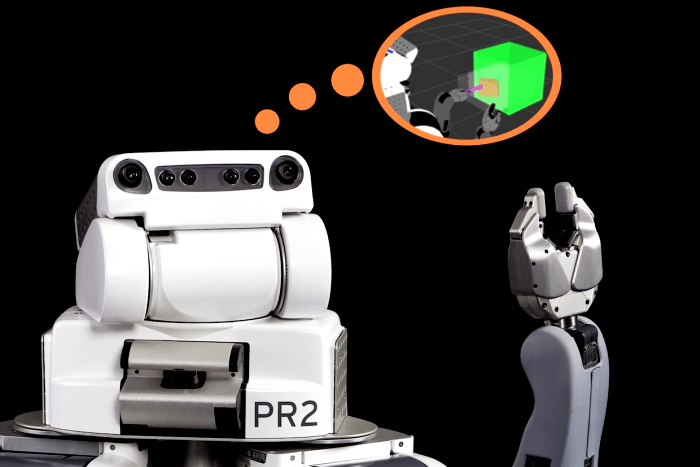
PR2 lokalizuje półkę (po lewej) oraz narzędzie (po prawej).
PR2 może wykonać kolejne ruchy, jeśli poprzednie zakończą się niepowodzeniem. Na ogół jednak do pełnego sukcesu wystarczy tylko jedna lub dwie próby. Ta sama metoda może być użyta nie tylko do przesunięcia podnoszonego przedmiotu, ale także do odsunięcia otaczających go rzeczy, aby uzyskać łatwiejszy dostęp.
Kolejnym krokiem może być wyposażenie robotów chwytających w wiele narzędzi, z których mogłyby w każdej chwili wybierać. Jeszcze ciekawszym rozwiązaniem byłoby projektowanie potrzebnych przyrządów przez same roboty i samodzielne drukowanie ich w 3D.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...