Roboty na czterech kołach to nic nowego. Jednak mało kto decyduje się na budowę pojazdów DIY z kołami mecanum wheels, dzięki którym można poruszać się w dowolnym kierunku (np. w bok).
Główną przeszkodą jest wysoka cena gotowych kół tego typu. Okazuje się jednak, że można je wykonać samodzielnie – wystarczy drukarka 3D.
Autor kanału How To Mechatronics przedstawił projekt bardzo ciekawej konstrukcji, która może być zdalnie sterowana za pomocą zbudowanej przez niego wcześniej aparatury RC na Arduino. Więcej na temat tego projektu w osobnym wpisie:
Do sterowania pojazdem RC można wykorzystać Bluetooth lub WiFi, dzięki czemu w roli nadajnika wystarczy nam telefon z odpowiednią... Czytaj dalej »
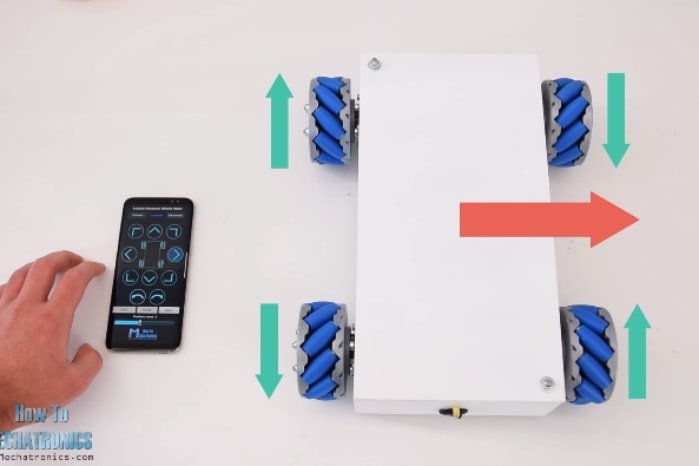
Większość pojazdów DIY z czterema kołami potrafi jeździć do przodu, do tyłu lub skręcać „jak czołg”. Użycie kół typu mecanum wheels daje znacznie większe możliwości. Specjalna konstrukcja takiego koła sprawia, że odpowiednie sterowanie napędami pozwala nawet na jazdę w bok lub po skosie.
Konstrukcja koła typu mecanum
Koła omawianego pojazdu wydrukowane zostały na drukarce 3D. Każde koło składa się z 10 rolek, które zamocowane są pod kątem 45 stopni. To właśnie dzięki temu koło tego typu pozwala na znacznie większą swobodę ruchów.
Jazda w bok – kierunki pracy napędów
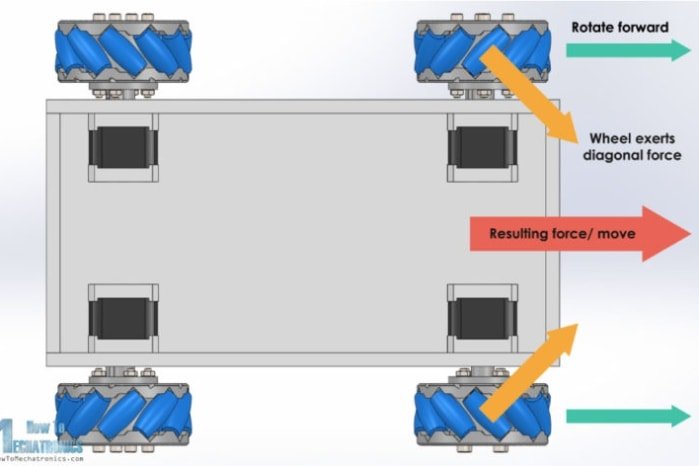
Jazda do przodu – kierunki pracy napędów
Sercem urządzenia jest płytka Arduino Mega, do której podłączone są cztery sterowniki silników krokowych DRV8825, moduł radiowy NRF24L01 oraz moduł Bluetooth HC-05 (dzięki niemu pojazdem można sterować również z telefonu). Całość zasilana jest z akumulatorów LiPo. Wszystkie komponenty znajdują się na specjalnym shieldzie zaprojektowanym przez autora.
Elektronika niezbędna do działania opisywanego projektu
Proces budowy tego pojazdu oraz ostateczny efekt można zobaczyć na poniższym filmie. Warto zwrócić szczególną uwagę na to, jak gotowa konstrukcja porusza się w praktycznie dowolnym kierunku – tak zbudowany napęd daje znacznie większe możliwości.
Wszystkie elementy niezbędne do budowy konstrukcji są łatwo dostępne. Jeśli macie więc dostęp do drukarki 3D, to bez problemu będziecie mogli odtworzyć opisywany projekt. Niezbędne pliki oraz dokładną instrukcję budowy znajdziecie na stronie autora. Mieliście kiedyś styczność z pojazdami, które były wyposażone w koła tego typu?
Większość robotów kroczących napędzana jest za pomocą serwomechanizmów. Autor opisywanych konstrukcji postanowił jednak zbudować małe... Czytaj dalej »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.


























Trwa ładowanie komentarzy...