Modułowe roboty, które potrafią zmienić swoją konfiguracje znane są z niezwykłej uniwersalności. Nie zawsze konstrukcja taka jest jednak w stanie wykonać zadanie. Niezależnie od ustawień poszczególnych modułów nie da się pokonać pewnych przeszkód (np. przepaści lub zbyt wysoki stopni). Gdy człowiek napotka zbyt wysoką przeszkodę sięga np. po drabinę. Dlaczego robot nie może też sobie pomagać?
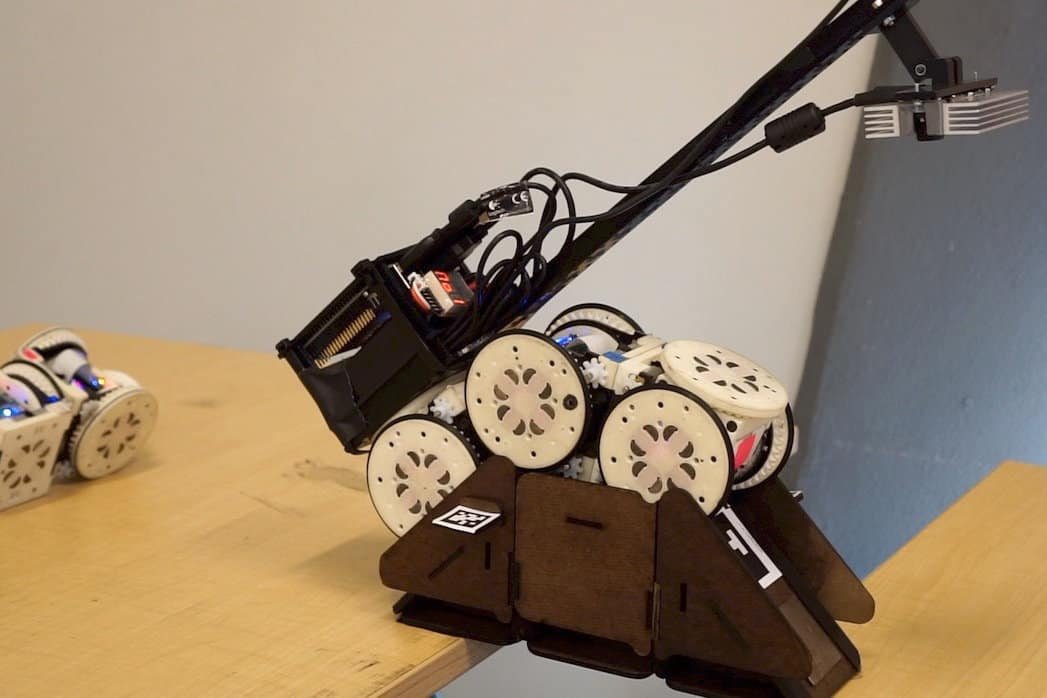
Robot korzystający z dodatkowych elementów.
Opisywany bohater pochodzący z ModLabu Uniwersytetu w Pensylwanii składa się z niezależnych, sześciennych modułów mocowanych do siebie za pomocą magnesów. Nie to jest jednak najciekawsze. Badacze z UPenn i Cornell postanowili nauczyć robota modyfikować otoczenie przez wykorzystywanie dodatkowych elementów. Dzięki temu może on np. zbudować most i pokonać "przepaść".
Miniaturyzacja robotów generuje również nowe problemy. W przypadku zbyt małych urządzeń interakcja z ludźmi i otoczeniem jest utrudniona.... Czytaj dalej »
Na poniższym filmie przedstawiono 2 przykłady. Robot wykonuje określone zadania, które nie byłyby w zasięgu robota, gdyby nie dodatkowe elementy:
Oczywiście to dopiero pierwsze, bardzo proste przykłady wykorzystania tej technologii. Nietrudno sobie jednak wyobrazić robota, który w przyszłości będzie potrafił zbudować pochylnię np. ze znalezionych kamieni. Potencjał rozwiązań tego typu jest ogromny. Konstrukcje takie mogą szczególnie przydać się np. podczas akcji ratunkowych po trzęsieniach ziemi.
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY na bazie Arduino i Raspberry Pi.
To nie koniec, sprawdź również
Przeczytaj powiązane artykuły oraz aktualnie popularne wpisy lub losuj inny artykuł »
Dołącz do 30 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.























Trwa ładowanie komentarzy...